全国大学生智能车竞赛:姿态传感器与倾角计算实战
版权申诉
PDF格式 | 3.29MB |
更新于2024-08-02
| 181 浏览量 | 举报
"全国大学生智能车竞赛经验分享—直立车.pdf"是一份关于全国大学生智能车竞赛的详细教程,特别关注了直立车的设计和实现,其中重点介绍了姿态传感器,尤其是MPU6050在平衡控制中的应用。作者首先强调了姿态传感器在直立车中的关键作用,尤其是在保持车辆稳定性和判断行驶方向时,加速度计和陀螺仪的结合至关重要。
在文章中,作者以MPU6050为例,详细讲解了如何利用其加速度计获取车辆的倾角。他们通过解释加速度计的工作原理,指出当车辆在XY平面上旋转时,加速度传感器测量到的重力加速度在两个轴上的投影,从而通过atan2函数计算出倾角。作者还提供了一个封装好的函数,用于从传感器数据中实时计算倾角,并对结果进行了处理,以适应车辆的实际控制需求,如将角度范围限制在0到90度,便于后续的控制器设计。
然而,单纯依赖加速度计可能会引入运动误差,因此作者提到需要结合陀螺仪来减小这种毛刺效应。陀螺仪能够感知车辆的旋转速度,这对于消除由运动产生的加速度干扰非常有效。作者同样提供了一个陀螺仪倾斜角计算函数,以便在实时控制中准确地判断车辆的姿态。
这份文档不仅适用于直立车的设计者,对于其他类型的智能车或机器人项目,其中的传感器使用和数据处理方法也有很高的参考价值,因为它展示了如何将理论知识应用于实际问题,以及如何优化算法以提高系统的稳定性和精度。对于大学生参与智能车竞赛的学生和爱好者来说,这是一份宝贵的资源和实践指南。
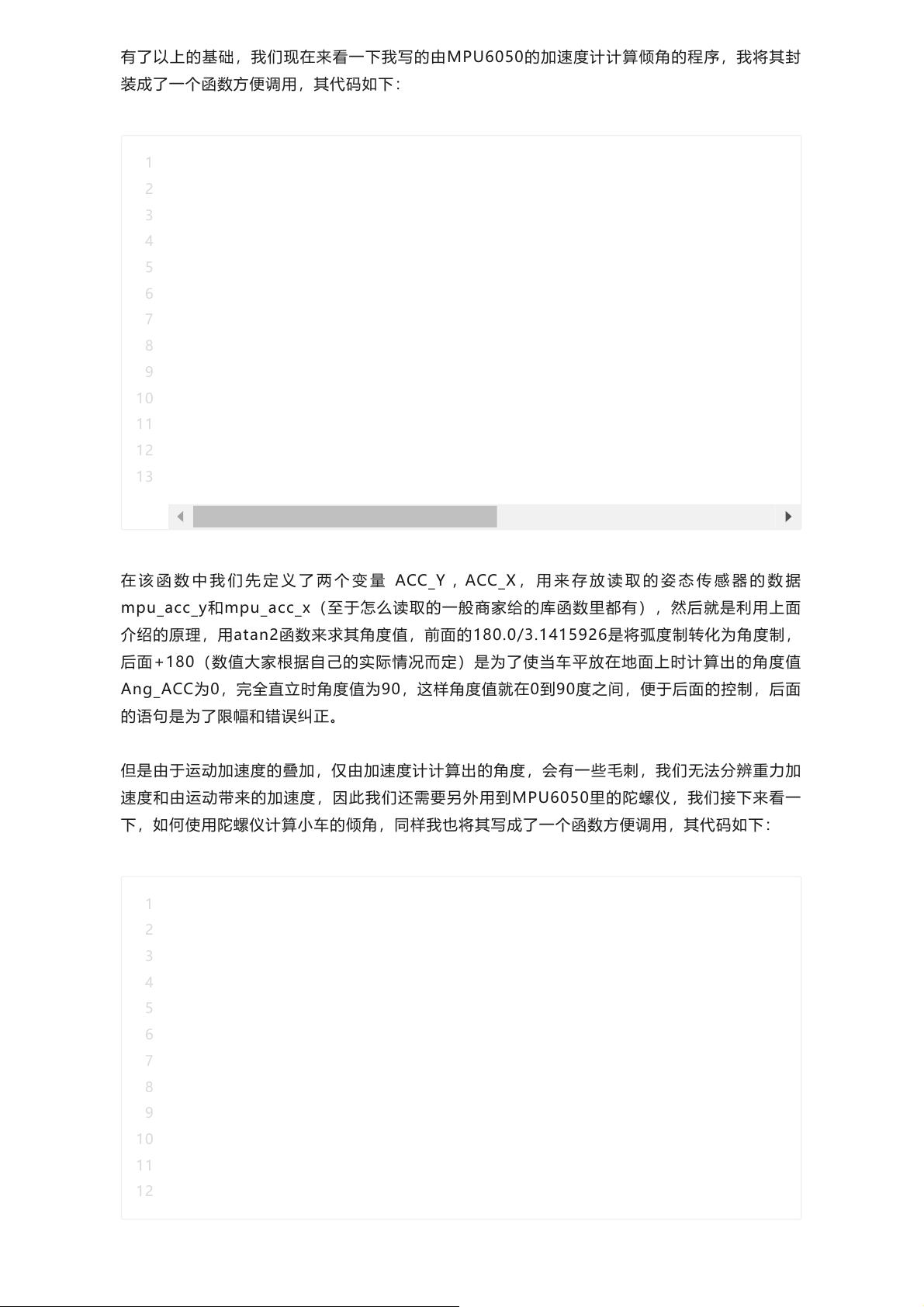
有了以上的基础,我们现在来看一下我写的由MPU6050的加速度计计算倾角的程序,我将其封
装成了一个函数方便调用,其代码如下:
在 该 函 数 中 我 们 先 定 义 了 两 个 变 量 ACC_Y , ACC_X , 用 来 存 放 读 取 的 姿 态 传 感 器 的 数 据
mpu_acc_y和mpu_acc_x(至于怎么读取的一般商家给的库函数里都有),然后就是利用上面
介绍的原理,用atan2函数来求其角度值,前面的180.0/3.1415926是将弧度制转化为角度制,
后面+180(数值大家根据自己的实际情况而定)是为了使当车平放在地面上时计算出的角度值
Ang_ACC为0,完全直立时角度值为90,这样角度值就在0到90度之间,便于后面的控制,后面
的语句是为了限幅和错误纠正。
但是由于运动加速度的叠加,仅由加速度计计算出的角度,会有一些毛刺,我们无法分辨重力加
速度和由运动带来的加速度,因此我们还需要另外用到MPU6050里的陀螺仪,我们接下来看一
下,如何使用陀螺仪计算小车的倾角,同样我也将其写成了一个函数方便调用,其代码如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
void ACC_Ang_Caculate() //由加速度计计算得到角度值
{
float ACC_Y , ACC_X;
ACC_Y=-1.0*mpu_acc_y;
ACC_X=mpu_acc_x;
Ang_ACC=(180.0/3.1415926*(float)(atan2(ACC_Y,ACC_X)))+180 ; //Ang_
if( Ang_ACC>180) {Ang_ACC=0 ;}
if(Ang_ACC>90) Ang_ACC=90; //限幅
if(Ang_ACC<0) Ang_ACC=0;
}
1
2
3
4
5
6
7
8
9
10
11
12
void Gyro_Ang_Caculate() //由陀螺仪的角速度计算出角度
{
float Gyro_Z;
Gyro_Z=mpu_gyro_z;
Car_Gyro_Z=(float)(Gyro_Z*1.0-Gyro_Z_init0);
Gyro_Speed_Z=(float)((Gyro_Z*1.0-Gyro_Z_init0)*Gyro_speed_Z_Ratio);
Ang_Gyro=(float)(Ang_Gyro+(float)(Gyro_Speed_Z));
if(Ang_Gyro>90) Ang_Gyro=90; //限幅
if(Ang_Gyro<0) Ang_Gyro=0;
}
下载后可阅读完整内容,剩余11页未读,立即下载
相关推荐



阿拉伯梳子
- 粉丝: 2869
 我的内容管理
展开
我的内容管理
展开







最新资源
- Delphi开发的Android数据查询WebService教程
- MATLAB在金融数量分析中的应用与技巧
- 解决非英语系统中FME扩展ArcGIS扩展问题
- 打造个性侧边栏抽屉效果的iOS源代码
- 谷歌翻译API在网站多语言转换中的应用
- 掌握IPOP4.1:网络工程师的十大实用网络管理功能
- Cain4.9汉化版及Winpcap32/64位绿色安装指南
- 提升效率的快捷键小程序使用教程
- Intel HEX与BIN文件互转工具介绍
- 2006年软件设计师历年试题精解与答案解析
- MATLAB系统辨识仿真源码及其可视化教程
- 自定义TBActivityView源代码教程:实现翻转型进度指示器
- 车载导航仪端口检测新软件:简易运行,即时显示波特率与端口
- MPEG-2解析工具及TS流分析教程
- Android ListView下拉刷新功能实现教程
- Android资讯类APP开发:JSON(xml/Webservice/UPnP)交互教程











