视觉定位技术:摄像头坐标转换与畸变校正
需积分: 5 39 浏览量
更新于2024-06-30
1
收藏 7.14MB PPTX 举报
本文主要探讨了摄像头定位方案的设计与验证分析,涉及相机坐标系转换、畸变校正、相机标定、位姿估计以及坐标定位等多个关键知识点。
1. 坐标系转换与畸变校正:
- 相机坐标系与世界坐标系之间的转换是基于刚体变换,包括旋转矩阵R和平移向量T,用于描述物体在不同坐标系下的位置关系。
- 从世界坐标系到相机坐标系,通过旋转和平移矩阵进行变换,以确保物体形状不变。
- 图像坐标系和相机坐标系之间的关系是透视投影,利用相机内参(焦距、主点坐标等)和外参(旋转和平移)进行转换。
- 径向畸变和切向畸变是图像失真的主要原因,径向畸变导致边缘变形,切向畸变则源于透镜与成像平面不完全平行。OpenCV库提供了校正这些畸变的方法。
2. 相机标定与内参外参:
- 利用OpenCV的相机标定算法,可以求得相机的内参与畸变系数,内参包括焦距、主点坐标等,畸变系数用于描述镜头的非理想特性。
- 外参则是相机相对于世界坐标系的位置和姿态,由旋转矩阵R和平移向量T表示,用于将世界坐标系中的点转换到相机坐标系。
3. 位姿估计:
- 通过对图像特征的检测和匹配,可以估计相机相对于已知目标的位姿,即旋转矩阵和平移向量。
- 位姿估计通常结合特征点检测(如SIFT, SURF)和PnP问题(Perspective-n-Point)解决。
4. 图像校正与像素坐标转换:
- 径向畸变校正通过牛顿迭代法或布朗模型来实现,切向畸变可通过额外的校正项来纠正。
- 像素坐标系和图像坐标系间的转换依赖于相机的物理参数,如像素尺寸(dx, dy),用于将物理坐标转换为像素坐标。
5. 实际坐标定位:
- 在获得相机的内外参数和位姿后,可以将图像中的像素坐标转换为世界坐标,从而实现对目标物体的实际位置定位。
6. 技术实现:
- 此过程通常使用计算机视觉库如OpenCV,它提供了丰富的函数支持相机标定、畸变校正、特征检测、位姿估计等操作,并且可以使用C++进行编程实现。
摄像头定位方案设计与验证分析涵盖了从理论基础到实践应用的多个方面,包括几何变换、相机模型、图像处理和计算机视觉算法,这些知识对于开发基于视觉的定位系统至关重要。
原理说明
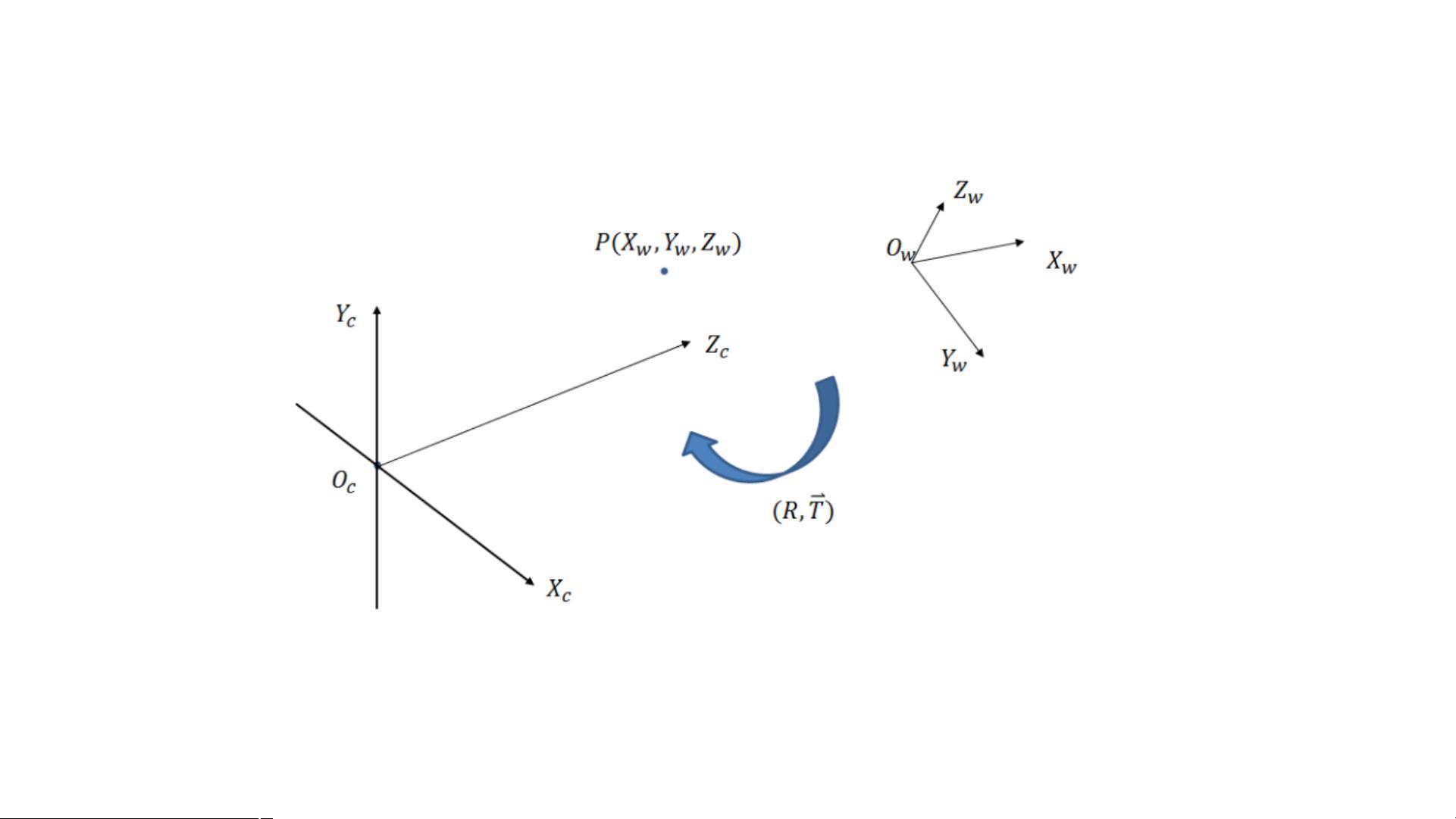
• 世界坐标系与相机坐标系
从世界坐标系变换到相机坐标由于物体没有发生形变,只进行平移和旋转,属于刚体变换
R:表示旋转矩阵
T:表示平移向量
剩余27页未读,继续阅读
2010-04-04 上传
2023-09-22 上传
2023-11-27 上传
2023-05-02 上传
2023-06-13 上传
2023-08-01 上传
2023-05-05 上传

半叶清枫
- 粉丝: 5
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Hadoop生态系统与MapReduce详解
- MDS系列三相整流桥模块技术规格与特性
- MFC编程:指针与句柄获取全面解析
- LM06:多模4G高速数据模块,支持GSM至TD-LTE
- 使用Gradle与Nexus构建私有仓库
- JAVA编程规范指南:命名规则与文件样式
- EMC VNX5500 存储系统日常维护指南
- 大数据驱动的互联网用户体验深度管理策略
- 改进型Booth算法:32位浮点阵列乘法器的高速设计与算法比较
- H3CNE网络认证重点知识整理
- Linux环境下MongoDB的详细安装教程
- 压缩文法的等价变换与多余规则删除
- BRMS入门指南:JBOSS安装与基础操作详解
- Win7环境下Android开发环境配置全攻略
- SHT10 C语言程序与LCD1602显示实例及精度校准
- 反垃圾邮件技术:现状与前景
