飞思卡尔智能车竞赛:直立车控制系统设计
需积分: 10 16 浏览量
更新于2024-07-25
收藏 4.26MB PDF 举报
"直立车控制系统是基于单片机的自平衡电动车控制设计,来源于第七届全国大学生‘飞思卡尔’杯智能汽车竞赛电磁组的直立行车参考设计方案,旨在实现车辆在行驶过程中的稳定平衡、速度和方向控制。"
本文档详细介绍了直立车控制系统的各个关键组成部分和设计原理,包括平衡控制、速度控制、方向控制等。在原理篇中,首先阐述了直立行走任务的分解,将控制任务分为保持车模直立、速度调节和方向调整等几个核心部分。接着,深入探讨了车模直立控制的物理模型,利用单摆理论分析车模在行驶过程中的动态行为。
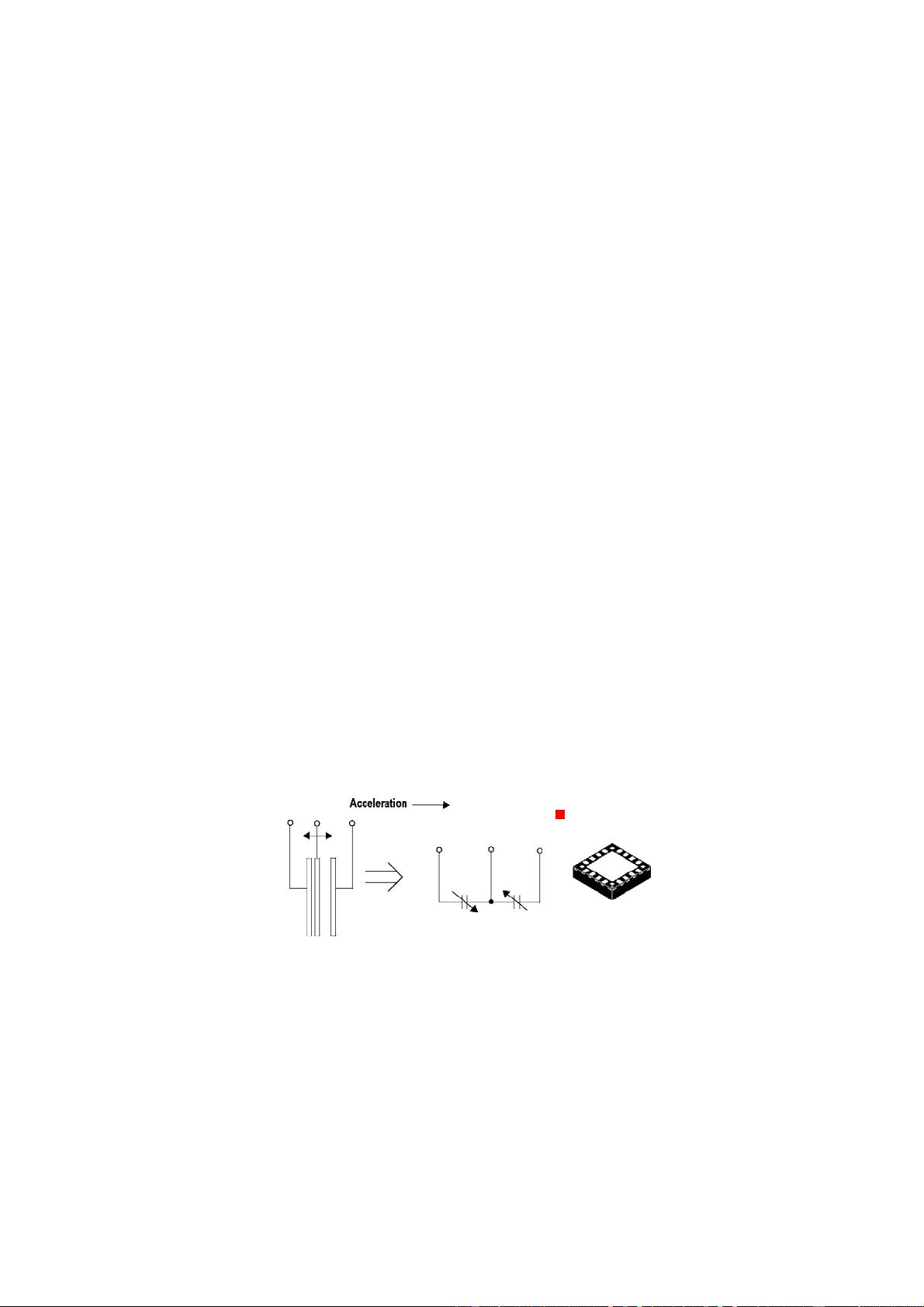
车模的角度和角速度测量是实现自平衡的关键,这部分详述了如何通过加速度传感器和角速度传感器来获取这些数据。例如,MMA7260三轴加速度传感器用于测量车模的加速度变化,而角速度传感器则用于计算车模的转动速率。这些数据经过处理后,用于实时调整电机的转速和方向,以保持车模的稳定。
在电路设计篇中,详细列出了整体电路框图,涵盖了单片机最小系统、倾角传感器、电机驱动、速度传感器、电磁线检测以及角度计算等电路设计。每个部分都有详细的电路图和元件介绍,如DSC(数字信号控制器)、电机驱动电路和传感器电路等。
机械设计篇讨论了车模的改装和传感器的安装位置,以优化结构和提升性能。同时,还提到了在设计和制作过程中需要注意的事项,确保车模的稳定性和可靠性。
软件开发篇主要介绍了软件框架和DSC的硬件资源配置,包括主要算法的设计和实现,如PID控制算法,用于精确地控制电机速度和调整车模姿态。
车模调试篇提供了详细的参数调试指南,包括桌面静态和现场动态条件下的调试方法,以及如何根据测试结果改进方案,提升车模的整体性能。
这个直立车控制系统的设计方案是一个综合性的工程实践项目,涵盖了电子、机械和控制理论等多个领域,旨在通过单片机控制实现自平衡电动车的稳定行驶。通过理解并实践这个方案,参与者可以深入学习到智能车控制系统的各个环节,为相关领域的研究和开发打下坚实基础。

k
1
k
2
适当的类比和想
象,可以使我们
更容易理解控制
原理。
图 2‐10 车模控制两个系数作用
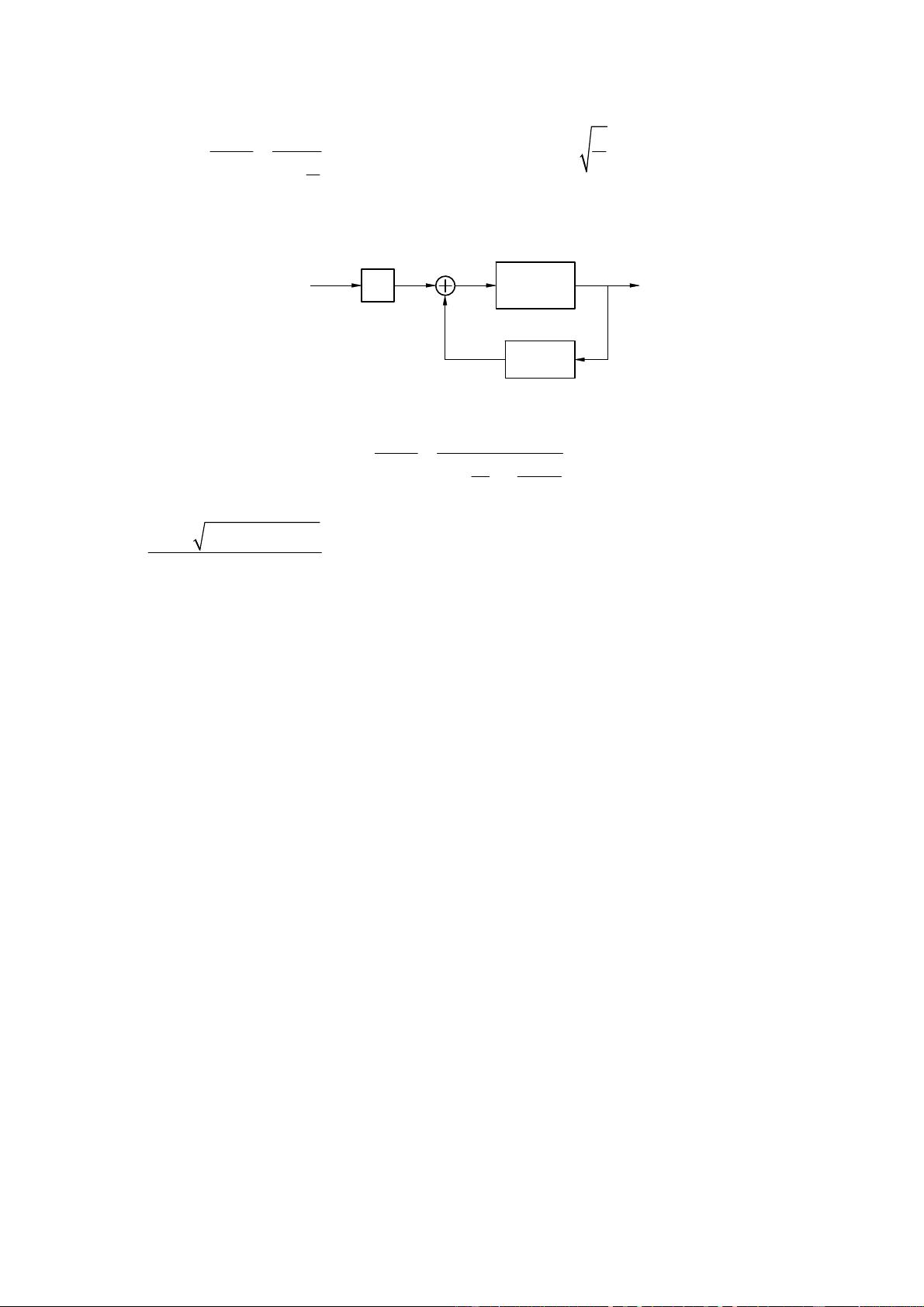
在上面简单分析中,通过类比倒立摆得到了车模直立的控制方案。下面对倒立车模
进行简单数学建模,然后建立速度的比例微分负反馈控制,根据基本控制理论讨论车模
通过闭环控制保持稳定的条件。
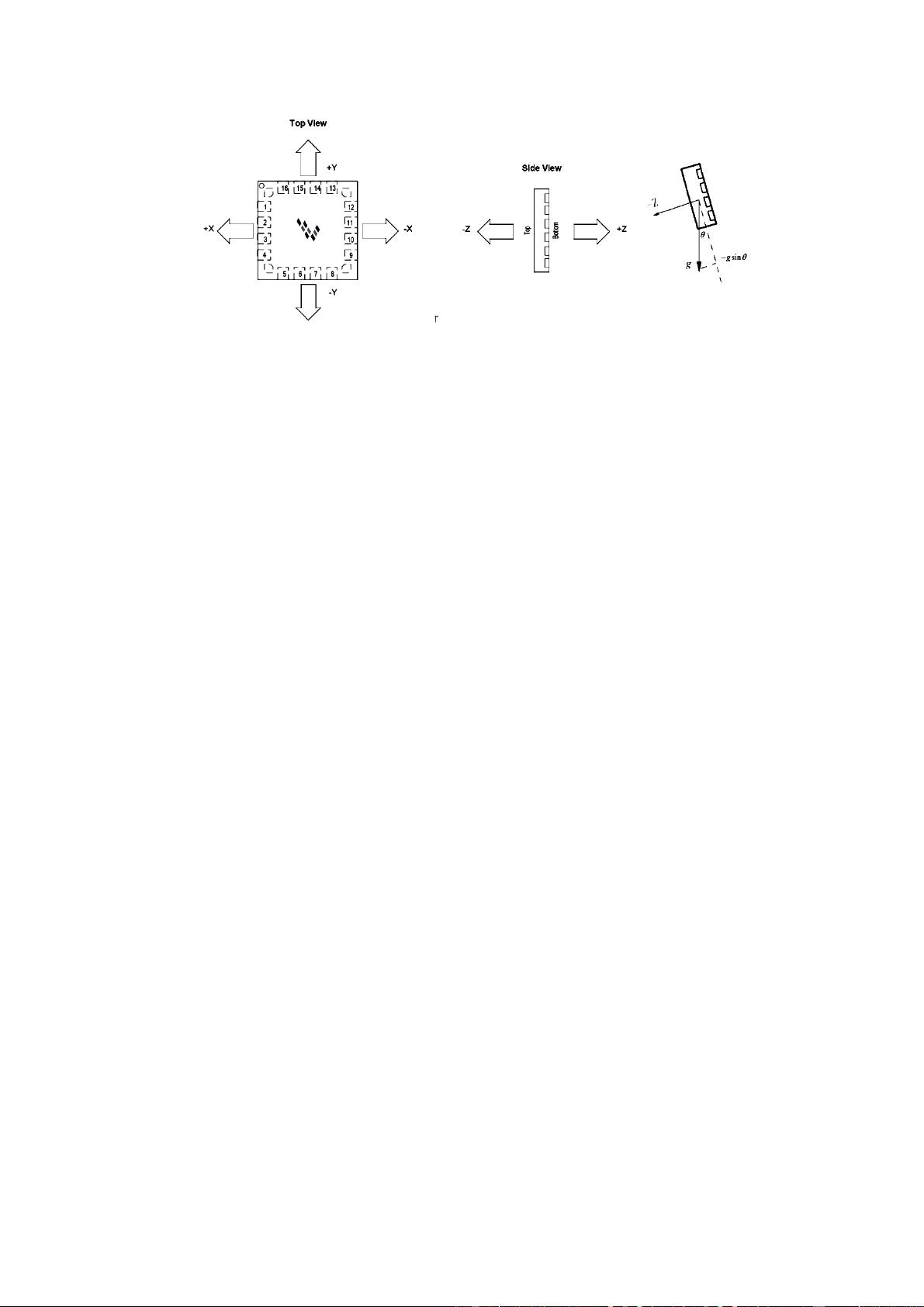
假设倒立车模简化成高度为 L,质量为 m 的简单倒立摆,它放置在可以左右移动的
车轮上。假设外力干扰引起车模产生角加速度 ()
x
t 。沿着垂直于车模地盘方向进行受力
分析,可以得到车模倾角与车轮运动加速度 以及外力干扰加速度()at ()
x
t 之间的运动方
程。如图 2-11 所示。
mg
θ
()
() () ()
2
2
d
d
t
LgtatLxt
t
θ
θ
=−+
()
xt
L
()
at
重心高度
外力引起的
角加速度
车轮运动加速度
车模
倾角
车模运动方程
()
() () () ()
2
2
d
sin cos
d
t
LgtattLxt
t
θ
θθ
=− +⎡⎤ ⎡⎤
⎣⎦ ⎣⎦
在角度θ很小时,运动方程简化为:
车模静止时:
()
0at =
()
() ()
2
2
d
d
t
LgtLxt
t
θ
θ
=+
图 2‐11 车模运动方程
对应车模静止时,系统输入输出的传递函数为:
16

剩余107页未读,继续阅读
2019-04-21 上传
2019-04-27 上传
2018-04-29 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-09 上传
2021-09-08 上传

gugang29
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
