欧拉角详解:三维空间取向的旋转矩阵与顺序说明
需积分: 17 89 浏览量
更新于2024-09-13
收藏 332KB PDF 举报
欧拉角是一种在三维空间中描述刚体方向的数学工具,由莱昂哈德·欧拉提出,用于表示相对于某一固定参考系(如实验室参考系)的刚体旋转。三个欧拉角分别是α、β和γ,它们定义了特定顺序下的旋转过程:
1. 静态定义:
- α:表示x-轴与与xy-平面与XY-平面交点线(N)的夹角。
- β:代表z-轴与Z-轴之间的夹角。
- γ:是交点线与X-轴的夹角。
欧拉角的顺序至关重要,因为不同的顺序可能对应不同的旋转序列。
2. 旋转矩阵:
- 三个欧拉角可以合成一个旋转矩阵,该矩阵由三个基本旋转矩阵组成,分别对应绕x、y和交点线N的旋转。其中,最外层矩阵代表绕Z轴的旋转,中间矩阵代表绕交点线N的旋转,最内层矩阵代表绕x轴的旋转。
- 当这些矩阵按照顺序相乘时,矩阵的顺序影响了最终旋转的效果,尤其是当改变旋转的执行顺序时,可能会得到不同的旋转矩阵。
3. 角值范围:
- α的取值范围是0到2π弧度。
- β的范围是0到π弧度,这是因为β代表的可能是顺时针或逆时针的旋转。
- 注意,某些特定的欧拉角组合(如α=0或2π,β=γ)可能表示相同的刚体取向,但并非所有组合都是这样。
4. 动态定义:
- 欧拉角的动态定义涉及到刚体在运动过程中如何通过连续的欧拉角变化来描述其运动状态。
5. 性质:
- 欧拉角具有一定的非唯一性,即不同的欧拉角组合可以表示相同的旋转,需要明确定义旋转顺序来消除歧义。
- 欧拉角的计算和变换可能涉及复杂的三角函数和矩阵运算。
6. 应用:
- 欧拉角广泛应用于航空航天、机器人学、计算机图形学等领域,特别是在需要模拟或控制物体在三维空间中的运动时。
7. 参考与链接:
- 本条目引用了维基百科,表明这是对欧拉角数学定义的权威来源,同时提供了一些参考资料和外部链接,以便读者进一步探究。
总结来说,欧拉角是理解刚体旋转的重要概念,它通过三个角度参数描述旋转,但理解和使用时需注意角值范围、旋转顺序以及可能存在的非唯一性问题。
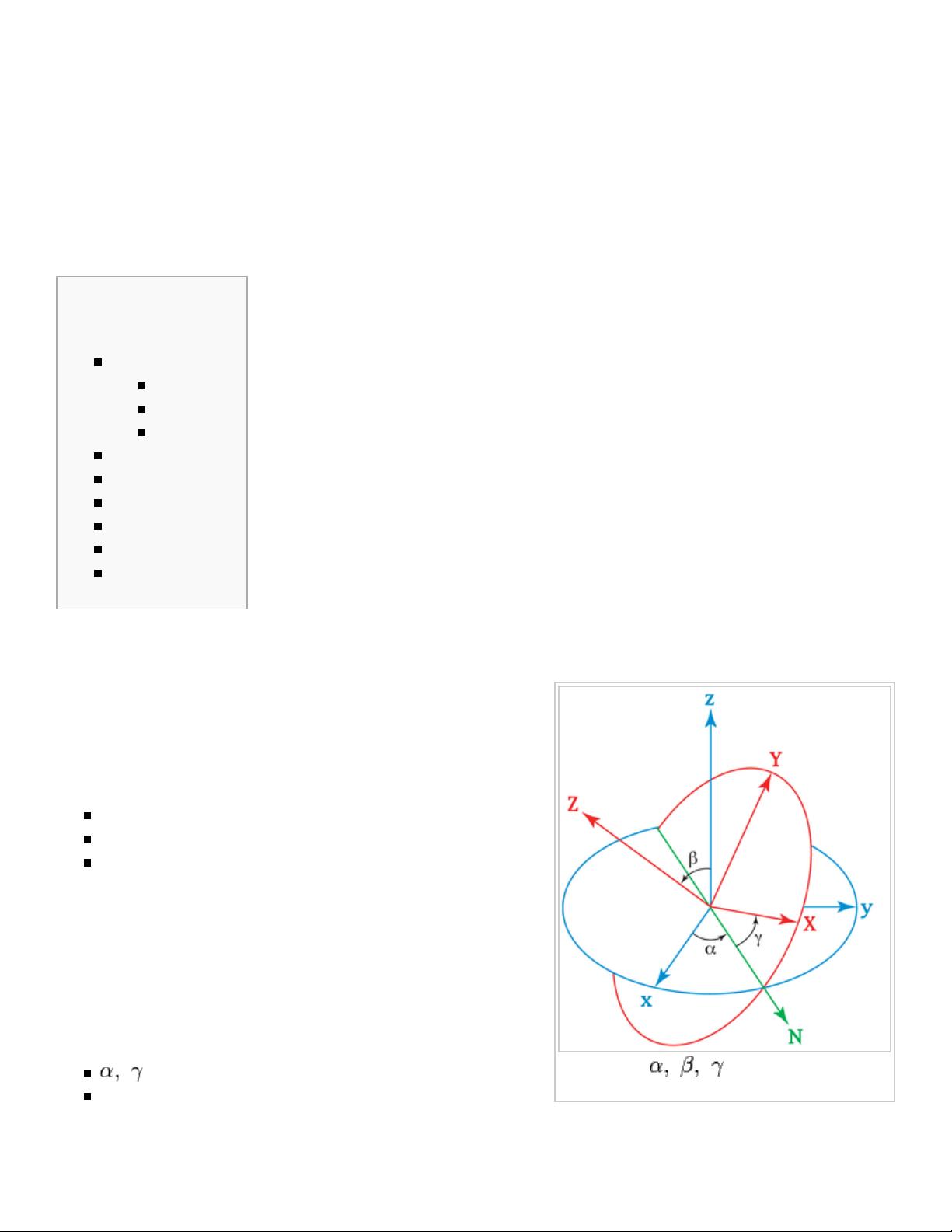
三个欧拉角: ( ) 。蓝色的轴是 xyz-轴,红
色的轴是 XYZ-坐标轴。绿色的线是交点线 (N) 。
欧拉角
维基百科,自由的百科全书
此条目讨论这词语的数学用法.关于航空航天的用法,请参阅 Tait-Bryan angles。
莱昂哈德·欧拉用欧 拉 角 来描述刚体在三维欧几里得空间的取向。对于任何一个参考系,一个刚体的取向,是依照顺序,从这参考
系,做三个欧拉角的旋转而设定的。所以,刚体的取向可以用三个基本旋转矩阵来决定。换句话说,任何关于刚体旋转的旋转矩阵
是由三个基本旋转矩阵复合而成的。
目录
1 静态的定义
1.1 角值范围
1.2 旋转矩阵
1.3 别种顺序
2 动态的定义
3 欧拉角性质
4 应用
5 参阅
6 参考文献
7 外部链接
静态的定义
对于在三维空间里的一个参考系,任何坐标系的取向,都可以用三个欧拉
角来表现。参考系又称为实验室参考系,是静止不动的。而坐标系则固定
于刚体,随着刚体的旋转而旋转。
参阅右图。设定 xyz-轴为参考系的参考轴。称 xy-平面与 XY-平面的相交
为交 点 线 ,用英文字母(N)代表。 z xz 顺 规 的欧拉角可以静态地这样
定义:
α 是 x-轴与交点线的夹角,
β 是 z-轴与Z-轴的夹角,
γ 是交点线与X-轴的夹角。
很可惜地,对于夹角的顺序和标记,夹角的两个轴的指定,并没有任何常
规。科学家对此从未达成共识。每当用到欧拉角时,我们必须明确的表示
出夹角的顺序,指定其参考轴。
实际上,有许多方法可以设定两个坐标系的相对取向。欧拉角方法只是其
中的一种。此外,不同的作者会用不同组合的欧拉角来描述,或用不同的
名字表示同样的欧拉角。因此,使用欧拉角前,必须先做好明确的定义。
角值范围
值从 0 至 2π 弧度。
β 值从 0 至 π 弧度。
对应于每一个取向,设定的一组欧拉角都是独特唯一的;除了某些例外:
下载后可阅读完整内容,剩余4页未读,立即下载
2021-03-21 上传
129 浏览量
2016-05-12 上传
2023-09-05 上传
2024-10-25 上传
2024-10-27 上传
2024-10-25 上传
2024-10-25 上传
2024-10-25 上传

NOHACKCC
- 粉丝: 26
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
