FANUC机器人滑台外部轴添加教程
版权申诉
159 浏览量
更新于2024-09-14
1
收藏 314KB DOC 举报
"这篇文档详细介绍了如何在FANUC机器人系统中添加带有滑台的外部轴,主要涉及了FANUC ARCMate 120ic*型号的机器人及其配置步骤。"
在FANUC机器人系统中添加带有滑台的外部轴是一个关键的配置过程,这对于实现更复杂的运动控制和自动化工作流程至关重要。以下是如何操作的详细步骤:
1. **启动设置**
首先,通过按下"PREV"和"NEXT"键进入控制系统,然后选择"CONTROLLED START",接着进入"MENUS",再选择"MAINTENANCE"菜单。这样,你可以进入设置机器人系统变量的界面。
2. **选择机器人组和选项**
在显示的屏幕上,使用箭头键将光标移动到"Group Robot Library/option",这里可以选择不同的机器人组和附加选项。对于FANUC ARCMate 120ic*,选择"1ARCMate120ic*"和"2Basicpositioner",表示远程位置调节器,以及"ExtendedAxisControl",用于设置滑台7和8轴。
3. **添加滑台轴**
输入相应的数字以添加滑台轴。输入1并按ENTER键添加滑台7、8轴,输入2并按ENTER键添加旋转轴9、10轴。这一步将为你的机器人定义额外的运动轴。
4. **硬件启动轴设置**
接下来,进入"Hardware start axis setting",这里你需要指定每个轴的硬件启动设置。例如,输入7表示将行走轴7设为"ExtendedAxisControl",对应Group1的第七轴;输入9表示将旋转轴9设为"Basicpositioner",对应Group2的第九轴。
5. **FSSB配置**
进入"FSSB configuration setting",FSSB(Fieldbus System Software Board)是FANUC机器人的通信板。默认情况下,输入1并按ENTER键,这通常关联到主轴卡。
6. **运动类型选择**
在"kinematics Typesetting"环节,你需要选择运动学类型。"1.known kinematics"通常用于已知的运动学模型,而"2.unknown kinematics"则适用于未知或自定义的运动学模型。根据你的系统配置和应用需求,选择合适的选项。
完成以上步骤后,FANUC机器人系统将识别并配置好带有滑台的外部轴,可以进行后续的编程和调试工作。确保在每个步骤中仔细检查输入,以防止出现配置错误。正确配置外部轴对于实现精准的机器人运动控制和提高工作效率至关重要。在实际操作过程中,务必参照FANUC的官方手册,并遵循安全指南。
FANUC 机器人调试
一、 添加外部轴
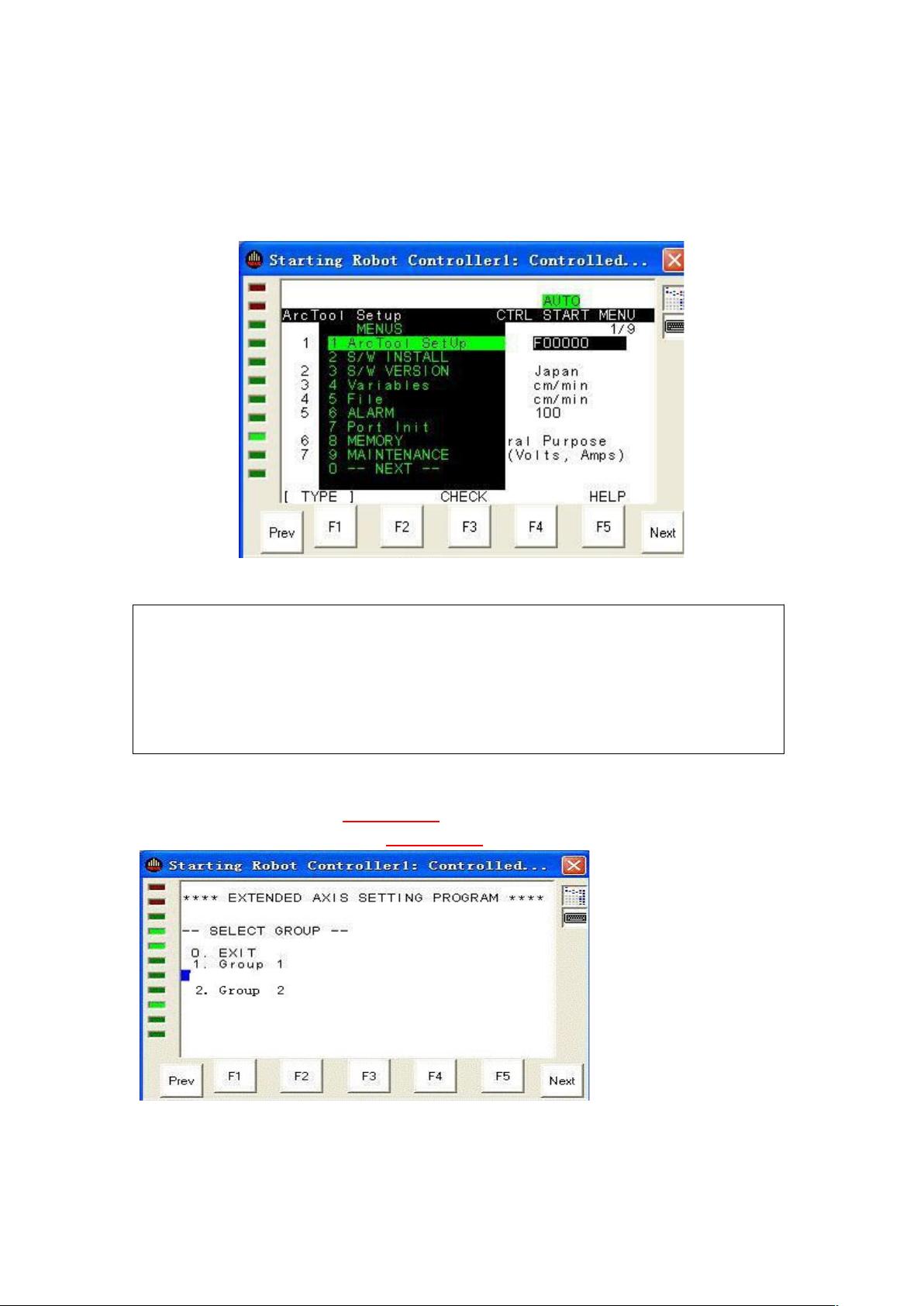
“PREV” key and “NEXT” → CONTROLLED START → MENUS → MAINTENANCE
1. You will see similar screen to the following one .
Setup Robot system variables (设置机器人系统变量)
Group Robot Library/option (选择机器群组)
1 ARC Mate 120ic *
2 Basic positioner (远程位置调节器)
Extended Axis Control
Type ORD-NO Auto MANUAL
2. Press arrow (上下键) keys and move the cursor to
“Basic positioner”. Then press F4. MANUAL. 变位机 9、10 轴
“Extended Axis Control”. Then press F4. MANUAL. 滑台 7、8 轴
输入 1,按 ENTER 进行滑台 7、8 轴的添加
输入 2,按 ENTER 进行滑台,9、10 轴的添加
下载后可阅读完整内容,剩余9页未读,立即下载
2020-05-05 上传
2022-05-27 上传
2019-10-23 上传
2022-11-21 上传

RB_TANG
- 粉丝: 9
- 资源: 32
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
