




RTK技术详解:差分GPS定位的精密与条件
差分GPS定位技术,全称为Real-Time Kinematic (RTK) 技术,是一种基于多台GPS接收机协同工作的高效定位方法。RTK的核心原理是通过基准站和移动站之间的数据交换来提高定位精度。基准站作为已知精确位置的固定设备,负责接收并处理卫星信号,并计算与移动站之间的距离差,然后将这些差分信息发送给移动站。移动站利用这些信息对自身接收到的卫星信号进行校正,从而显著减少定位误差。
RTK的工作流程包括实时处理两个测站间的载波相位差分,这种方法可以区分出接收机钟差、卫星钟差等引起的误差,并通过求差的方式消除大部分系统误差。关键的技术挑战在于快速解决初始整周模糊度问题以及确保数据链路的稳定和高可靠性,这关系到数据传输的波特率和抗干扰能力。
在正常工作条件下,RTK要求至少两台设备同时接收到至少5颗以上的卫星信号,且基准站必须持续向移动站发送差分信号。如果在移动站迁移过程中断或失去锁定,RTK需要重新初始化以恢复精度。
RTK的精度优势主要体现在其厘米级的定位精度。例如,徕卡350RTK的研究显示,在4公里内的测量范围内,误差控制在5厘米以内,超出这个范围精度会下降。卫星数量对精度有直接影响,即使只有5颗卫星,也能提供稳定的固定解,达到仪器标称的厘米级精度。对于测高精度,Trimble 4000SSE(OTF)的测试结果显示,垂直方向的精度可以达到20毫米+2PPM,大部分观测数据误差都在20毫米之内,证实了RTK在特定条件下能够达到标称精度。
然而,RTK的精度受多种因素影响,如信号强度、多路径效应、电离层延迟等。在实际应用中,需要综合考虑这些因素,确保信号质量和设备性能,以保证获得最佳的定位结果。差分GPS定位技术因其高精度和实时性,在大地测量、测绘、导航等领域得到了广泛应用。
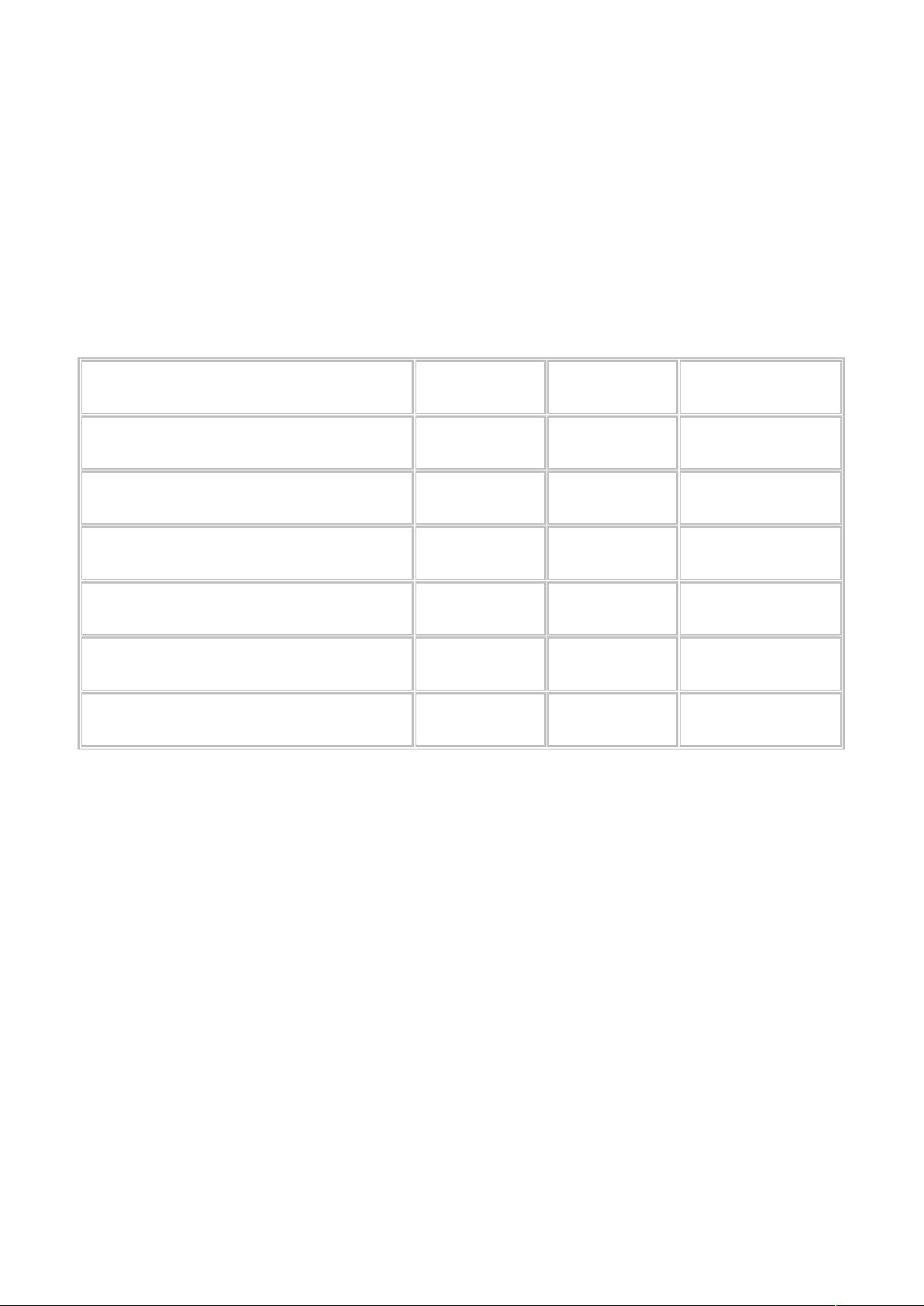
靠性和强抗干扰性主要受地形地势的影响。目前,RTK 系统的数据
传输多采用超高频(JHP)和高频(HF)播发差分信号,这三种频
率的特点如表 1 所示。
表 1 三种频率信号的特点
频段
UHF VHF HF
传播方式 直线传播 直线传播 电离层反射
随上传播距离[1](KM)
0-50 50-100 >100
绕射性能 很小 很小 大
盲区 无 无 有
噪声 很小 很小 大
投资比
1 1 >50
[1]采用 30W 电台
目前,在国际测绘领域的 RTK 应用中,无论单频和双频 RTK
系统,都采用 UHF 电台播发差分信号。UHF 是超短波,若基准站
的发射天线和流动站的接收天线均没有足够的高度,超短波沿地球
表面绕射传播,这样,电磁波在传播过程中不断被地面吸收而迅速
衰减,严重地限制了 RTK 的有效工作半径;若基准站的发射天线和
流动站的接收天线均有一定的高度且在直视距离内,超短波将以直
线波和地面反射波组成的相干传播方式传播,使 RTK 的有效工作半
4
下载后可阅读完整内容,剩余15页未读,立即下载
154 浏览量
2021-09-07 上传
2021-09-08 上传
点击了解资源详情

wen2007song
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 实现网页内容动态实时监控与智能提醒
- 现代家居中隐藏式书架的设计理念与空间利用优势
- 湖泊日出日落美景自驾游体验指南
- Prometheus配置MinIO时出现未知xl头版本错误解决方法
- 天津发布农业灌溉取水定额标准DB12/T 698—2016
- 2024年中国视频物联网与企业信息安全发展深度分析
- IBM指导卓越银行数字化转型核心实践与优先任务
- 民生银行新规范:应用程序接口安全管理
- 分布式平台事务处理技术新国标发布实施
- CFA Level I财报分析与股权投资策略教程
- AUO_G057VN01V1显示模块规格书概览
- 全球呼吸道病毒活动周报分析:2025年流感与SARS-CoV-2趋势
- 东鹏饮料2024年度报告:股利分配方案及风险提示
- MATLAB工具箱在仿真设计中的应用:涵盖机器人、控制、信号和图像处理
- 避免.NET多线程开发中的五大常见陷阱
- 西部云谷智慧园区构建“四化”高效管理模式






















