C++实现单像空间后方交会程序代码详解
需积分: 9 173 浏览量
更新于2024-09-17
收藏 115KB DOC 举报
本篇文章主要介绍了如何使用C++编程语言实现单像空间摄影测量的后方交会算法。单像空间后方交会是摄影测量中的一个关键步骤,它用于通过单张航摄图像上的特征点来恢复相机的姿态和目标点的三维坐标,从而进行空间定位和重建。本文提供了一个完整的程序代码示例,涉及到了以下几个关键知识点:
1. 矩阵运算函数:文章中定义了多个模板函数,如`inverse()`用于求逆矩阵,`transpose()`用于矩阵转置,`multi()`用于矩阵乘法,这些函数是实现后方交会算法的基础,因为它们涉及到线性代数中的矩阵操作。
2. 内方位元素(Internal Parameters):程序中使用的`fk`变量代表内方位元素,这是相机内部参数的一部分,用于描述镜头的几何特性,包括焦距、主点坐标等,对成像过程有直接影响。
3. 比例尺与估计:`m`变量代表估算的比例尺,这在实际应用中用于将像素坐标转换为实际尺寸,是摄影测量中必不可少的参数。
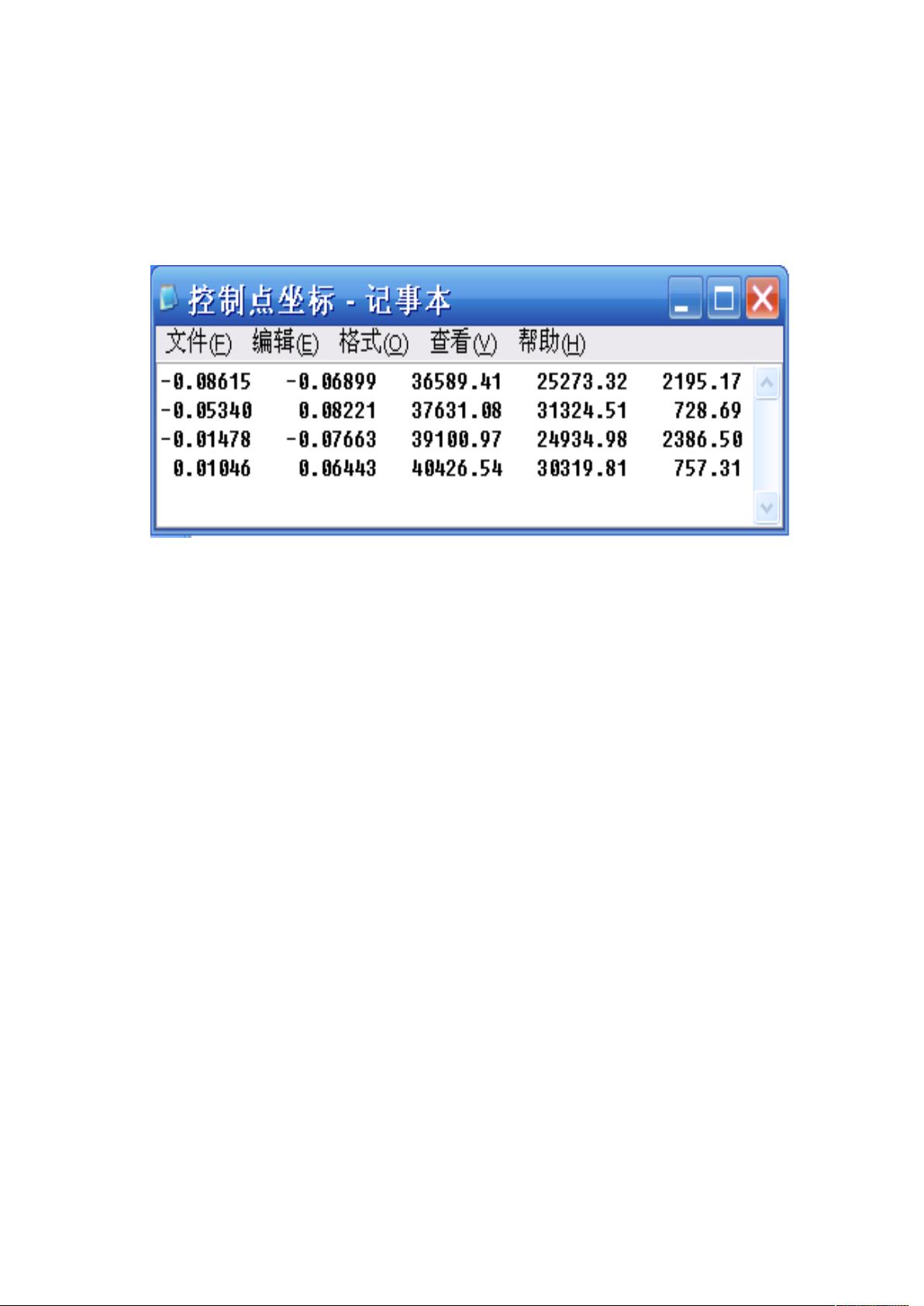
4. 控制点数据处理:`input()`函数用于从外部文件读取控制点的影像坐标(`B`数组)和地面坐标,这对于后方交会来说是初始化的关键数据。
5. 迭代计算:程序采用了迭代方法,通过`do...while`循环来进行多次迭代,每次迭代中计算旋转矩阵`R`,这与单像空间后方交会中求解姿态参数的过程紧密相关。
6. 未知数的初始估计:通过控制点的影像坐标,计算出一个初步的未知数起始值,如平移向量`Xs`, `Ys`, `Zs`,以及角度`Q`和`W`。
7. 未知数的优化:通过迭代计算,逐步调整这些未知数,直到达到收敛条件,即`f`(迭代次数)满足预设的终止条件。
这篇C++程序提供了单像空间摄影测量后方交会的基本实现框架,读者可以借此理解并学习如何在实际项目中应用这种技术,进行摄影测量的数据处理和分析。在实际操作时,还需要结合硬件信息、相机模型、噪声处理等相关知识,以确保最终结果的精度和可靠性。
单像空间后方交会程序
西南交通大学 土木工程学院 测绘工程 张慧鑫 学号:20030593
输入文件形式如下:
C++源程序如下:
#include <iostream>
#include <fstream>
#include <cmath>
#include <string>
#include <iomanip>
using namespace std;
const int n=6;
void inverse (double c[n][n]);
template<typename T1,typename T2>void transpose (T1*mat1,T2*mat2,int a,int b);
template<typename T1,typename T2>void multi(T1*mat1,T2 * mat2,T2 * result,int
a,int b,int c);
template<typename T>void input (T*mat,int a,int b);
template<typename T>void output(T*mat,char*s,int a,int b);
int main()
{
ofstream outFile;
cout.precision(5);
double x0=0.0, y0=0.0; double fk=0.15324; //内方位元素
double m=39689; //估算比例尺
double B[4][5]={0.0},R[3][3],XG[6][1],AT[6][8],ATA[6][6],ATL[6][1];
input (B,4,5); //从文件中读取控制点的影像坐标和地面坐标,存入数组 B
double Xs=0.0, Ys=0.0, Zs=0.0,Q=0.0,W=0.0,K=0.0;
double X,Y,Z,L[8][1],A[8][6];
//确定未知数的出始值
下载后可阅读完整内容,剩余6页未读,立即下载
2018-08-31 上传
137 浏览量
2021-11-23 上传
2021-12-11 上传
2011-12-19 上传
2009-10-26 上传
2009-06-01 上传

fang505157908
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- DTSR fMRI 重建:通过施加双时间稀疏性进行 fMRI 重建的 DTSR 方法-matlab开发
- Git安装
- workload-collocation-agent:业务流程感知的工作负载并置代理-一个可以帮助您并置工作负载的守护程序
- 蓝色天空下载PPT模板
- cards.io:用于数字名片的 MERN 应用程序
- 页
- mad-eye-moody:SpotifyMoodify应用程序HackNC 2018
- 钢结构施工组织设计-04SG519-2多、高层建筑钢结构节点连接(主梁的全栓拼接)
- 图像光盘
- 训练有素的模型和代码来预测 3 个拼图挑战中的有害评论:有毒评论分类、有毒评论中的意外偏见、多语言有毒评论分类
- Kozak 散点图:这个易于阅读的散点图可以快速突出显示变量的最小值和最大值。-matlab开发
- 古典花纹背景PowerPoint下载PPT模板
- 电影:使用REST API的快速演示应用程序
- myo-java-JNI-Library:为myo-java项目构建JNI DLL所需的C ++ C文件
- Klix.ba-crx插件
- OverdriveNTool 0.2.9:最新版本 0.2.9-开源
