智能灭火机器人:硬件电路设计与实现
56 浏览量
更新于2024-09-02
2
收藏 207KB PDF 举报
"智能灭火机器人硬件电路设计及其实现在人工智能领域中的应用"
智能灭火机器人作为一种集成了先进技术和创新理念的装置,其硬件电路的设计至关重要。在智能机器人灭火比赛中,硬件电路不仅是机器人的核心部分,更是决定其性能的关键因素。比赛自1994年由美国三一学院发起以来,已成为全球范围内具有高度影响力的智能机器人竞赛。
硬件电路的总体设计通常包括控制器、传感器输入、驱动输出等多个模块。控制器作为核心,负责处理和解析来自各种传感器的信息,以及控制机器人的运动和决策。在这个过程中,嵌入式系统扮演了重要角色,例如使用基于ARM9的微处理器,它具备高速处理能力和实时响应特性,能高效处理来自传感器的数据。
嵌入式系统的硬件设计中,高精度的数据采集是必不可少的。例如,设计中配置了8路ADC端口用于快速采集环境信息,同时利用辅助单片机ATMEGA816-PC处理更多传感器数据,如远红外传感器,进一步增强机器人的感知能力。此外,PWM控制信号输出端口用于精确控制电机转速,而数字输出端口则用于驱动伺服电机、蜂鸣器、继电器和LED等设备,实现复杂动作和反馈。
电源和驱动电路是确保机器人稳定运行的基础。设计中通常需要考虑不同组件所需的电压等级,比如电机驱动和控制器可能需要不同电压的电源。良好的电源设计不仅能提供稳定的电力,还能有效防止过载或短路等问题,确保机器人在比赛过程中的安全性和可靠性。
传感器的选择和布局也是硬件设计的重点。在智能灭火机器人中,可能会使用多种传感器,如红外传感器、超声波传感器、接触传感器等,它们协同工作,帮助机器人定位火源,避开障碍物,实现精确导航。
通信技术在现代智能机器人中也扮演着重要角色,尽管标签中提到了“无线网络”,但具体实现方式未在内容中详述。通常,无线网络可以用来远程监控机器人状态,或者与其他机器人或控制系统进行数据交换,提高比赛策略的灵活性。
智能灭火机器人的硬件电路设计是一项综合性的工程,涉及到嵌入式系统、传感器技术、电源管理、驱动电路以及通信技术等多个方面。设计时需要充分考虑性能、实时性、稳定性和成本等因素,以实现最佳的比赛表现。随着技术的不断发展,智能灭火机器人在硬件设计上将更加智能化、高效化,推动人工智能在实践应用中的边界不断拓展。
智能灭火机器人硬件电路设计及实现智能灭火机器人硬件电路设计及实现
智能机器人灭火比赛由美国三一学院于1994年创办,目前已成为全球规模最大、普及程度最高的全自主智能机
器人大赛之一。硬件电路是智能灭火机器人整体的核心骨架,其参数性能及设计的合理性直接决定了智能灭火
机器人的性能。
经过50多年的发展,人工智能已形成极广泛的研究领域,并且取得了许多令人瞩目的成就[1]。人工智能也称
智能机器人灭火比赛由美国三一学院于1994年创办,目前已成为全球规模最大、普及程度最高的全自主智能机器人大赛
之一。
1 硬件电路的总体设计
灭火比赛的任务是在一封闭房间模型中,随机在其中一个房间里放置蜡烛代替的火源,要求机器人在尽可能短的时间里无
碰撞地找到火源并完成灭火。
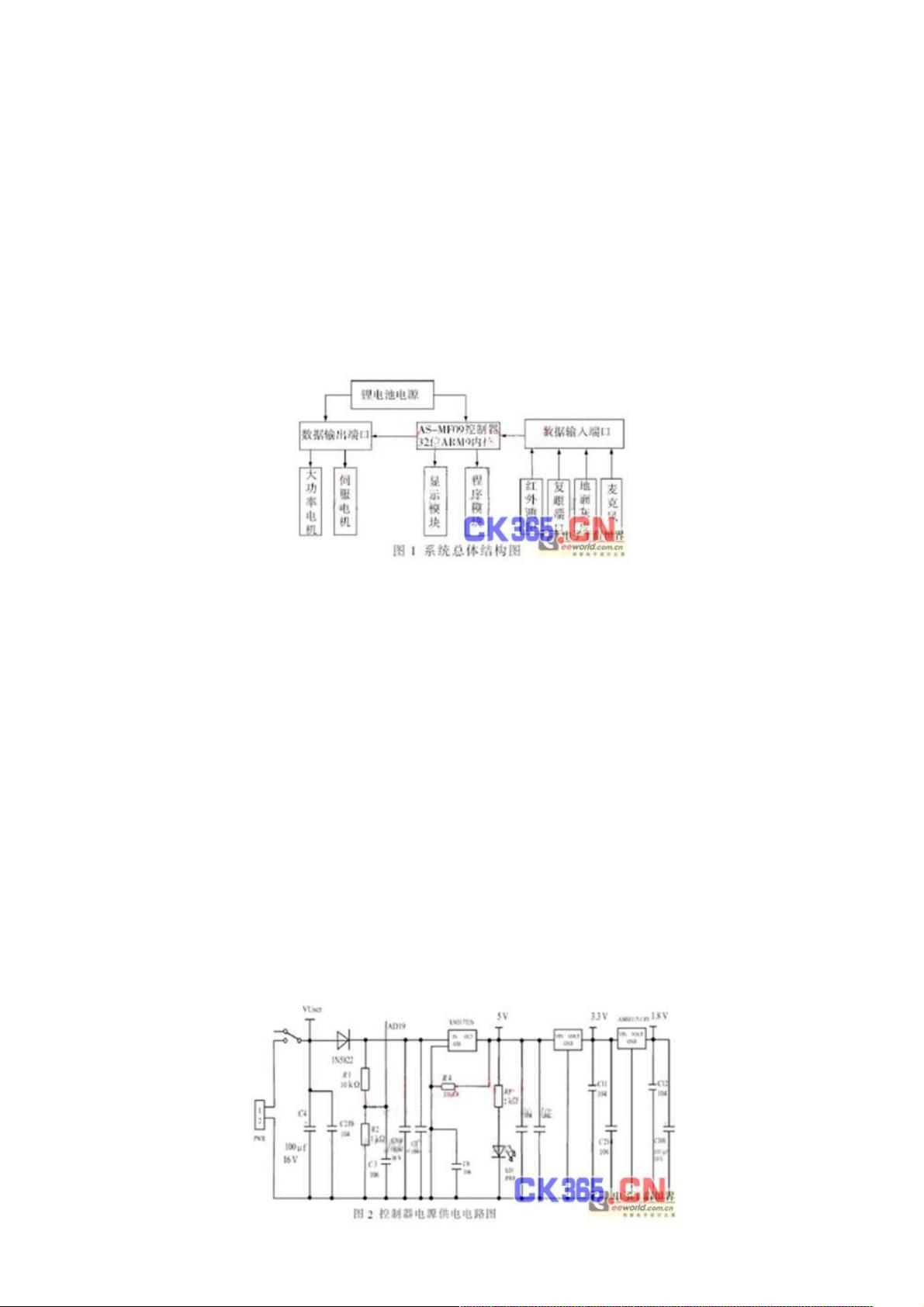
根据比赛要求及功能需要,灭火机器人的总体结构如图1所示,主要由控制器、传感器输入、驱动输出等模块组成。
2 硬件电路的主要部件分析与设计
2.1嵌入式系统
为实现机器人高速精确地按照规定路径行走,要求机器人的CPU能够实时迅速地读取多个传感器端口数值,并在较短的
时间内完成对各端口数值的存储、运算和输出等多种任务。由于嵌入式微处理器对实时任务具有很强的支持能力,能够完成多
任务并且具有较短的中断响应,因此在设计过程中选用以嵌入式微处理器ARM9为核心的控制器,其内部采用哈佛结构,每秒
可执行一亿一千万条机器指令。
为提高端口数值读取速度,使机器人能对周围环境信息做出迅速判断,本设计在主芯片上设置了ADC0~ADC7(P4.0~
P4.7)8路数据输入端口,每秒可实现50万次数据采集;另外又设置20路数据输入端口,通过ATMEGA816-PC辅助单片机连接
到主芯片上,用以读取远红外传感器组及检测端口的数值,每秒可实现1 000次数据采集。本设计还设置了4路PWM控制信号
输出端口,用以驱动4路大功率直流电机,实现对转速的精确调节;此外,还设置了7路Do数字输出端口,用以驱动伺服电机、
蜂鸣器、继电器、发光二极管等。为了给庞大和复杂的程序提供更多的执行空间,本设计附加设置了100 KB的数据存储器
(RAM)和512 KB的程序存储器(Flash ROM),用以存储更多的数据和命令。
2.2 电源和驱动电路设计
(1)电源及采样电路
电源是保证机器人稳定、可靠运行的关键部件,它直接影响着机器人性能的好坏。由于本机器人电机驱动和控制器采用两
种不同等级电压的电源,为避免2个电源相互干扰,本机器人采用双电源供电系统:电机电源采用高放电倍率聚合物锂电池,
容量为2 500 MAH,工作电压为24 V,能提供40 A的稳定供电电流,是普通电池的10倍;控制器电源采用8.4 V锂电池,并提供
电压采样端口,以供电池检测,电路图如图2所示。
为获得CPU各端口电路所需要的不同等级的电压,本设计采用1个LM317T三端稳压器和2个AMS1117低压差线性电压调
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2020-10-26 上传
2020-08-09 上传
点击了解资源详情
2022-06-11 上传
2022-06-11 上传
2019-09-05 上传









