掌握CANOPEN协议:多主通信与仲裁机制详解
版权申诉
CANOPEN协议详细讲解是一份深入解析CAN-BUS通信协议的专业文档。CAN-BUS全称Controller Area Network,是由ISO制定的一种串行通信协议,其设计目标是为工业自动化环境提供一种灵活、高效且成本效益高的通信标准。该协议主要应用于设备间的数据交换,尤其适合于远程、分散控制的场合。
CAN协议在ISO/OSI七层模型中对应传输层、数据链路层和物理层,它提供了传输数据的有序性、错误检测与恢复以及多主通信能力。以下是CAN协议的一些关键特点:
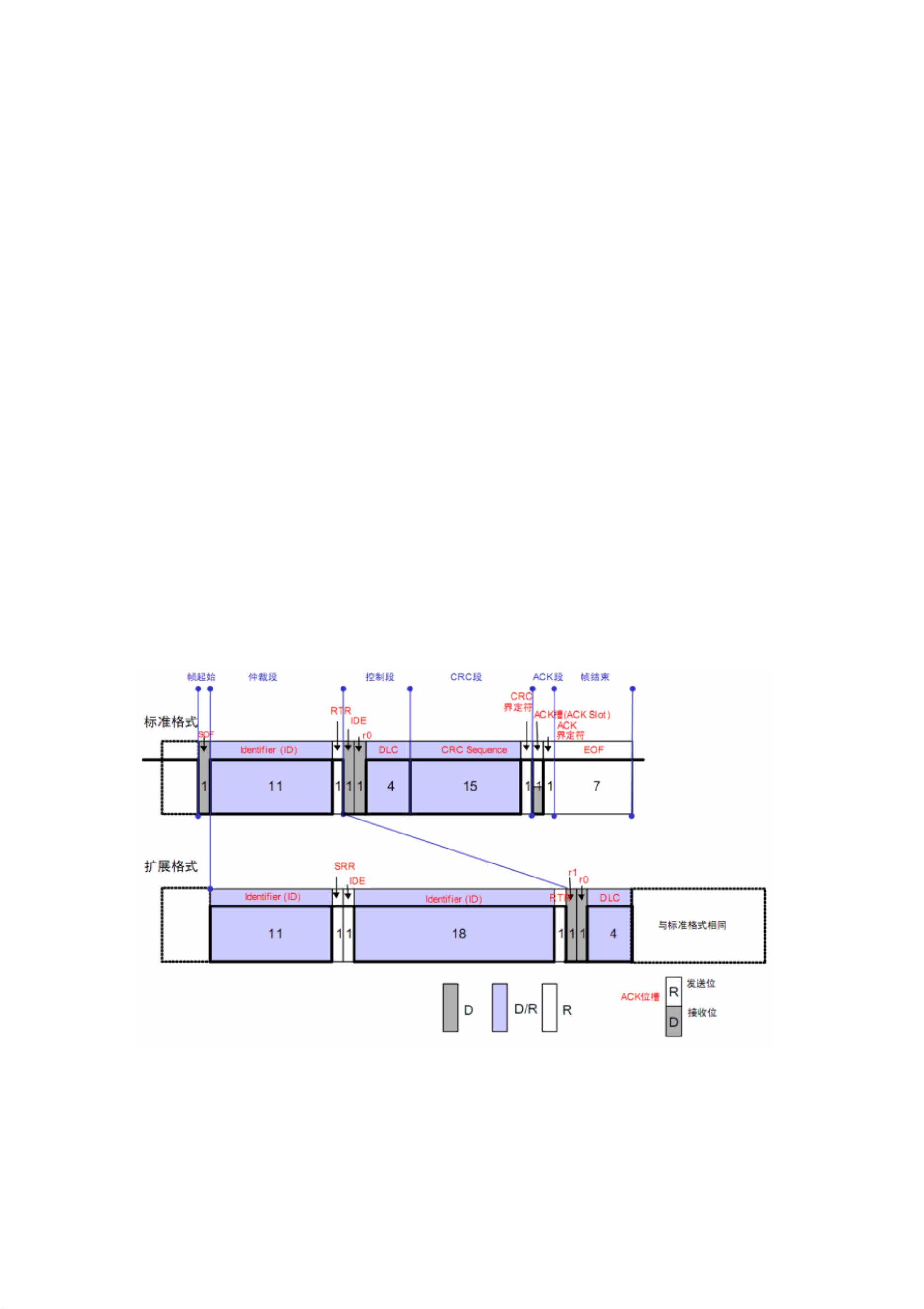
1. 多主控制:所有连接到总线的节点在总线空闲时都有平等的发送权,通过竞争方式获取发送权限。每个节点发送消息时,根据预设的标识符(ID)进行优先级仲裁,ID越高优先级越高。
2. 固定消息格式:CAN消息采用预定义的帧结构,包括起始位、同步位、帧确认、错误检测码、数据域和停止位。这保证了消息的统一性和一致性。
3. 灵活的系统架构:CAN协议允许连接的节点在网络中自由加入和离开,不会影响其他节点的正常通信,具有很高的系统柔性。
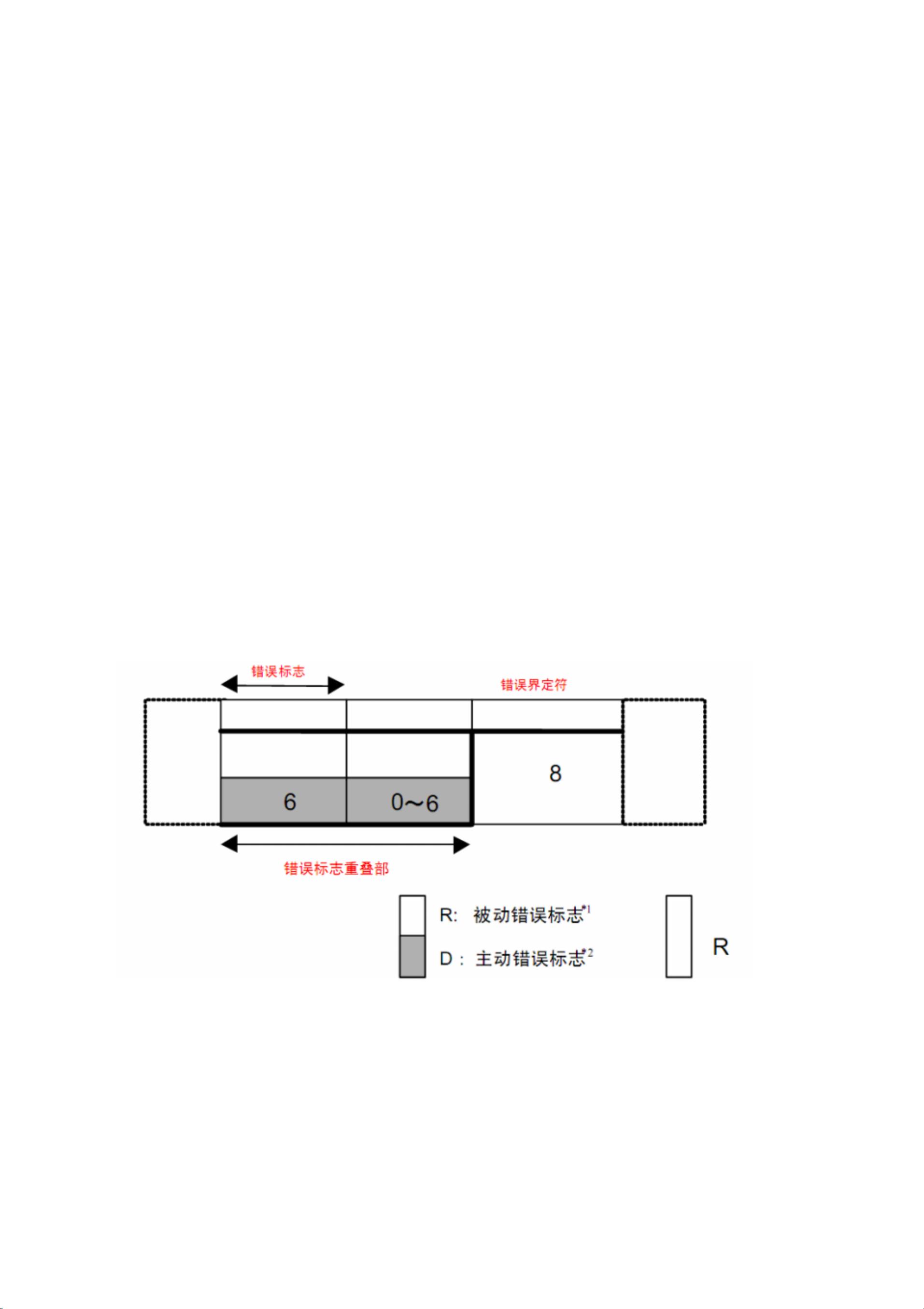
4. 错误处理:CAN协议具有强大的错误检测机制,包括错误帧检测、循环冗余校验(CRC)和错误纠正机制,提高了数据传输的可靠性。
5. 物理层实现:物理层规定了信号传输的具体规范,包括信号电平、接口标准和电缆类型,确保设备间的信号能有效传输。
通过学习这份文档,读者不仅能掌握CANOPEN协议的基础原理,还能深入了解如何在实际工程中应用这一技术,实现高效的设备通信和网络管理。对于从事自动化、嵌入式系统或设备互连的工程师来说,这是一份不可多得的参考资料。
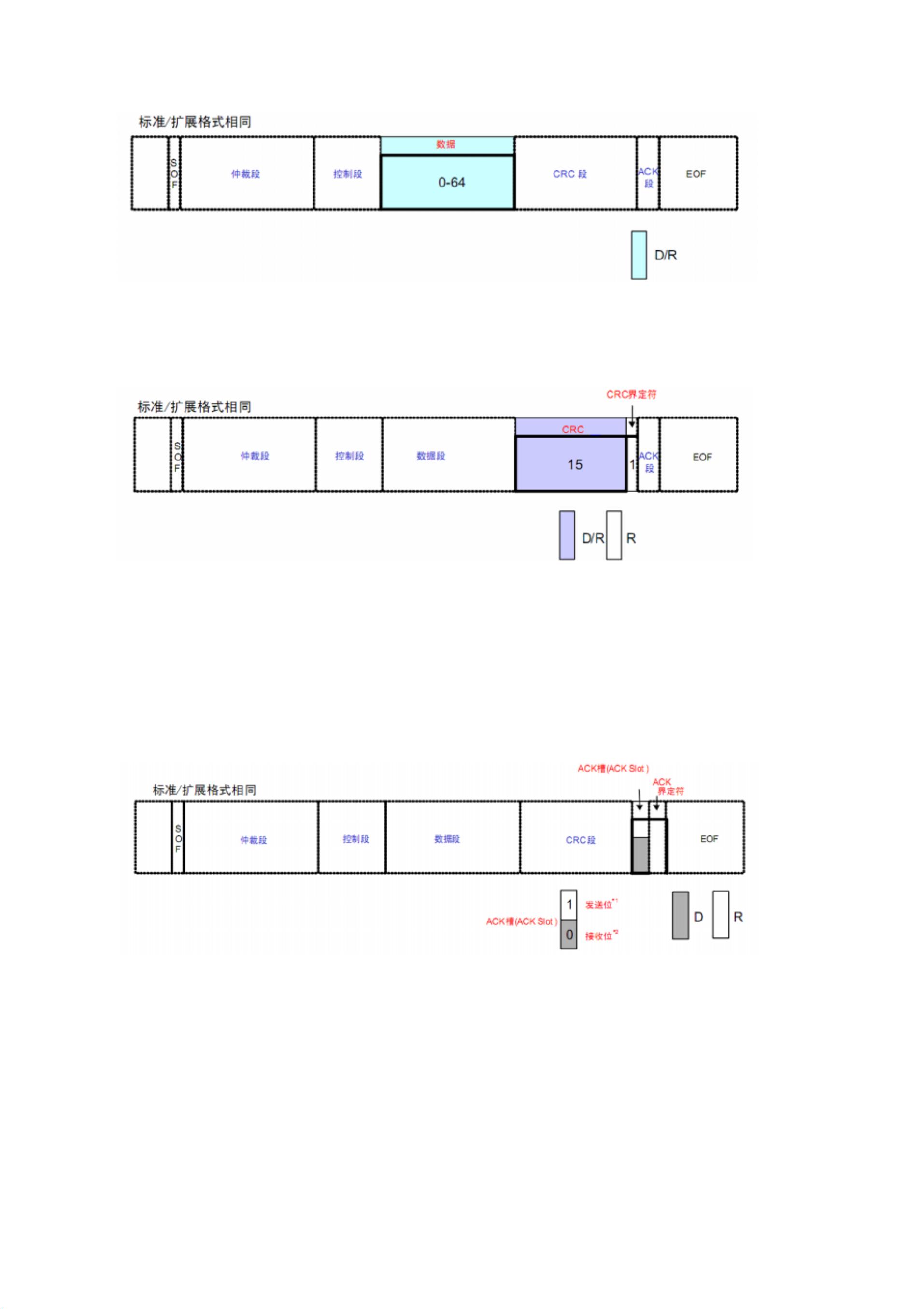
(5) CRC 段(标准 /扩展格式相同)
CRC
段是检查帧传输错误的帧。 由
15
个位的
CRC
顺序和
1
个位的
CRC
界定符(用
于分隔的位)构成。
【注】 CRC 顺序
CRC 顺序是根据多项式生成的 CRC 值,CRC 的计算范围包括帧起始、仲裁段、控
制段、数据段。
接收方以同样的算法计算
CRC
值并进行比较,不一致时会通报错误。
(6) ACK段
ACK 段用来确认是否正常接收。由 ACK 槽(ACK Slot)和 ACK 界定符 2 个位构成。
【注】
*1
发送单元的
ACK
段
发送单元在 ACK段发送 2 个位的隐性位。
*2 接收单元的 ACK段
接收到正确消息的单元在
ACK
槽
(ACK Slot)
发送显性位,通知发送单元正常接收结
束。这称作“发送 ACK”或者“返回 ACK”。
发送 ACK 的是在既不处于总线关闭态也不处于休眠态的所有接收单元中,接收到
正常消息的单元发送单元不发送
ACK
。所谓正常消息是指不含填充错误、 格式错误、
CRC
错误的消息。
剩余67页未读,继续阅读
531 浏览量
225 浏览量
124 浏览量
300 浏览量
1595 浏览量
179 浏览量
225 浏览量
2022-12-12 上传









