Carsim整车建模指南:前独立&后半独立悬架
需积分: 34 121 浏览量
更新于2024-07-17
6
收藏 6.46MB PDF 举报
"这份文档详细介绍了如何使用Carsim软件进行整车建模,特别是针对前独立悬架和后半独立悬架的车型。内容涵盖整车模型的创建、控制模型、外部环境模型的建立以及整车仿真分析,旨在帮助初学者快速掌握Carsim的建模规范和流程。"
在《Carsim整车建模规范-前独立悬架后半独立悬架》中,首先介绍了概述,强调了规范的适用范围和目标,即指导用户对具有特定悬架系统的车型进行建模和分析。规范特别以HL-1车型为例,使概念更为清晰。
接着,文档详细阐述了Carsim中的整车坐标系,这是一个重要的基础,用于定义车辆各部分相对于坐标轴的位置和力的方向。坐标系的定义是:纵向向前为正,侧向向左为正,垂直向上为正,这对于理解和计算车辆动态行为至关重要。
命名规则部分未给出具体细节,但通常在建模过程中,遵循一致且明确的命名规则可以提高模型的可读性和维护性。
在Carsim整车模型创建方法中,文档逐步讲解了各个子系统的建模过程,包括:
1. 整车基本参数模型创建,涉及车辆的基本几何尺寸和质量属性。
2. 整车空气动力学模型,考虑风阻和升力等因素。
3. 外造型模型,影响车辆的气动特性。
4. 动力传动系统模型,涉及发动机、变速器等组件的动力传递。
5. 制动系统模型,用于模拟刹车效果。
6. 转向系统模型,影响车辆的操控性。
7. 前后悬架的K(刚度)和C(阻尼)特性模型,影响车辆行驶稳定性和舒适性。
8. 轮胎系统模型,轮胎与路面的接触是车辆动态的关键。
控制模型创建部分,涵盖了不同类型的控制系统,包括:
1. 制动控制模型,如ABS(防抱死制动系统)。
2. 闭环控制,用于反馈控制策略。
3. 开环控制,基于预设输入的控制。
4. 不同情冑下的控制模型,适应各种驾驶条件。
5. Simulink控制模型,利用MATLAB/Simulink进行更复杂的控制设计。
外部环境模型创建部分,讲解了如何构建各种路面模型(如平路、环行路、凸包路等)和风模型(风速、风向),以模拟真实驾驶环境。
最后,整车仿真分析部分详细列举了操稳性能(如稳态回转、角阶跃、角脉冲、高速回正、蛇形仿真)和平顺性能(脉冲路面、随机路面)的仿真方法,这些分析有助于评估车辆的行驶稳定性、舒适性和操控性。
这份文档提供了全面的Carsim建模教程,涵盖了从基础模型构建到高级仿真分析的各个环节,对于学习和应用Carsim进行车辆动态分析的初学者极具价值。
第 9 页 / 共 50 页
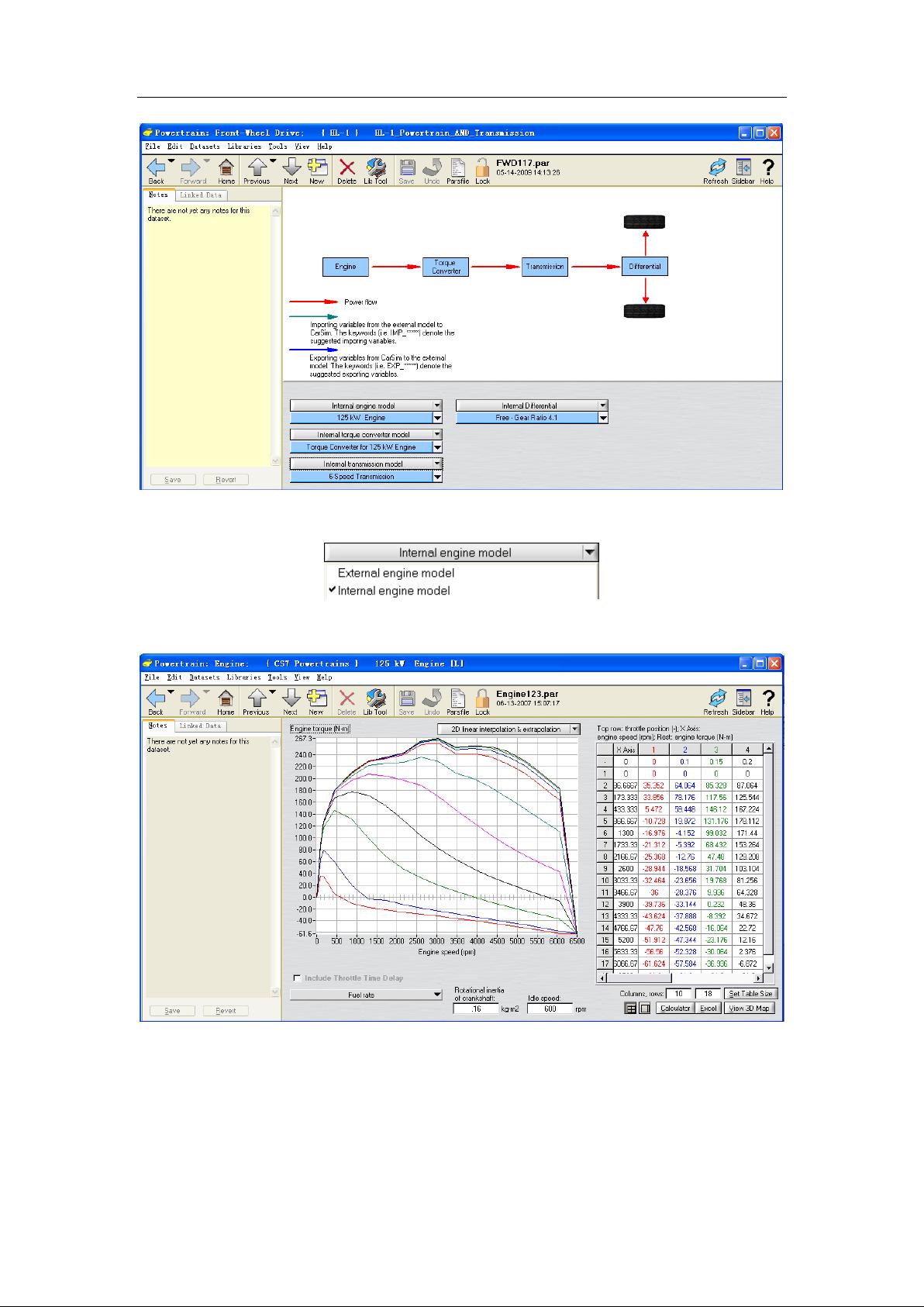
图 12 传动系统模型模板
图 13 发动机模板选择
图 14 发动机万有特性曲线编辑对话框
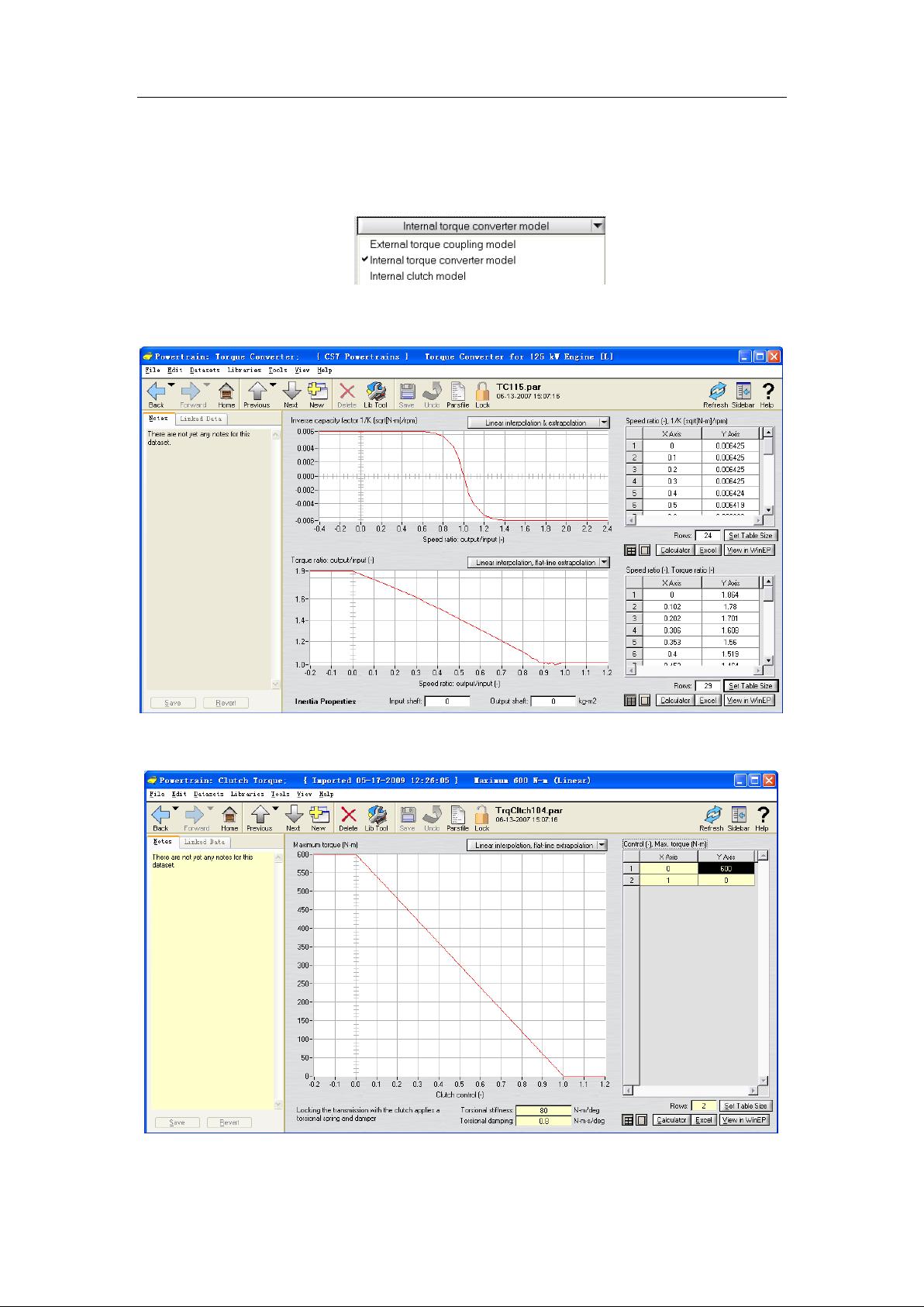
b. 在液力变矩器一栏中,如果为自动档的车,选择 internal torque converter
model(如果液力变矩器为外部模型,则选择 External torque converter
model。如图 15);如果为手动档的车,选择 internal cluth model。点击进
剩余49页未读,继续阅读
点击了解资源详情
点击了解资源详情
3573 浏览量
点击了解资源详情
2021-10-02 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

hejia3231
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 支付宝订单监控免签工具:实时监控与信息通知
- 一键永久删除QQ空间说说的绿色软件
- Appleseeds训练营第4周JavaScript练习
- 免费HTML转CHM工具:将网页文档化简成章
- 奇热剧集站SEO优化模板下载
- Python xlrd库:实用指南与Excel文件读取
- Genegraph:通过GraphQL API使用Apache Jena展示RDF基因数据
- CRRedist2008与CRRedist2005压缩包文件对比分析
- SDB交流伺服驱动系统选型指南与性能解析
- Android平台简易PDF阅读器的实现与应用
- Mybatis实现数据库物理分页的插件源码解析
- Docker Swarm实例解析与操作指南
- iOS平台GTMBase64文件的使用及解密
- 实现jQuery自定义右键菜单的代码示例
- PDF处理必备:掌握pdfbox与fontbox jar包
- Java推箱子游戏完整源代码分享
