多视角相机:点线融合的最小闭合位姿估计方法
21 浏览量
更新于2024-06-20
收藏 2.3MB PDF 举报
本文主要探讨了多视角相机的位姿估计问题,特别是在处理基于点和线的特征时的最小闭合解。作者Pedro Miraldo, Tiago Dias, 和 Srikumar Ramalingam针对这一领域提出了一种创新的方法。他们将多视角相机视为一组刚性连接的透视相机,这种配置特别适用于需要广阔视野的应用,如监控、自动驾驶和运动捕捉。
在传统的姿态估计中,问题通常聚焦于恢复相机相对于已知3D对象的空间位置和方向。文章关注的焦点在于两种特殊情况:一是利用两个点和一条线进行2D到3D的对应关系建立,这可以转化为一个四次方程,使得解具有封闭形式,提高了计算效率;二是涉及一个点和两条线的情况,尽管更复杂,但通过变换映射到一个八次方程,虽然没有直接的封闭形式解,但其理论和实验结果展示了其优势。
与现有的研究相比,该工作填补了多视角相机场景下同时考虑点和线特征位姿估计的空白。尽管现有方法分别处理了单点、单线和点线结合的情况,但混合使用这些特征的研究相对较少。作者通过详细的模拟和实际实验,验证了他们的方法在性能和计算效率上的优越性,这对于提高多视角相机系统的精度和实时性具有重要意义。
本文的核心贡献在于提供了一个针对多视角相机的点线混合特征的位姿估计最小闭合解,这对于优化计算机视觉应用中的定位、重建和导航任务具有重要的理论价值和实践指导意义。
4
P. Miraldo,T. Dias和S. Ramalingam
J
J
(a)
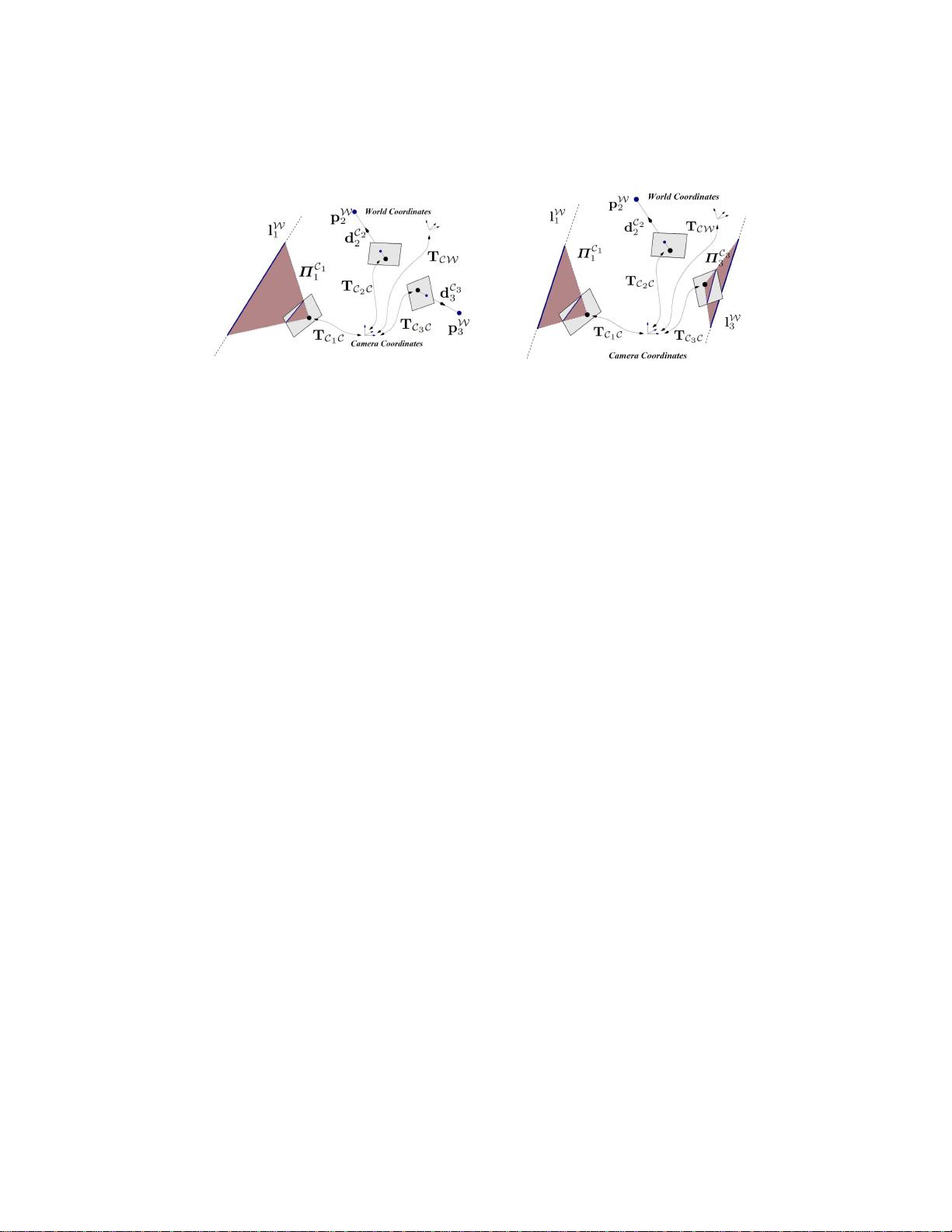
两点一线(二)一点一线。
图1:说明本文解决的两个极小问题 我们在两个不同的设置中估计变
换参数T_CW:我们有两个3D点、一条3D线和它们各自的图像(a)
的情况;以及我们有两条3D线、一个3D点和它们各自的图像的情况
(b)。
旋转矩阵R
CW
∈
SO(3)和平移向量t
CW
∈
R
3
,它们定义了相机和世
界坐标系之间的刚性变换
T
CW
∈
R
4×4
=
Σ
Σ
R
CW
t
CW
0
1
,
3
1
.
(一)
多视角相机被视为相对于彼此刚性安装的各个视角相机的集合。
我们使用
Ci
来
表示在
h
h hp
e
r
s
p
e
t
i
v
ec
am
e
r
a中的函数。
各个
相机和全局相
机坐标系之间的距离是已知的,即,T
C
i
C
已知,对于所有
i
。接下来,
我们定义多视角系统的姿态。
1)
使用
3D
点的相机姿势
对于一组3D点p
W
及其
由于相机参数是已知的,因此多个图像的姿态可以是
对于a {p
W
> →
d
C
i
}
,
j
=
1
,
. . .
,
N
,其中
J J
d
C
i
∈
R3
是逆投影方向,由在中看到的p
W
J J
摄像机
C
i
[40,41]。形式上,姿态由T
CW
给出,使得
Σ
δ
R
d
C
i
+
c
C
Σ
Σ
p
W
Σ
T
CW
j
C
i
C
j
1
I
=
j
1
对于所有
j =
1
,
. . .
,
N
,
(2)
其中
δ
j
是
p
Ci
,
w的未知数
。
R
.
t
.
c
∈
R3
.
J I
2)
使用
3D
线的摄影机姿势:
要在
w
or
l
d
we
u
se
P
l
u
¨
cker
co
or
din
at
es
[
42]
,
即
:
e
.
l
W
(
¯
l
W
,
~
l
W
)
where
¯
l
W
,
~
l
W
∈
R
3
j j j j j
是
李
宁
的导演和导演
。
如果您的
相机
没有
损坏
,
已知,它们各自的图像可以由解释平面表示
Π
Ci
∈
R
4
=
(
π
¯
Ci
,
π
ˇ
Ci
)
[
40,41
]
,
其中
π
¯
Ci
这是一个正常的向量,用于平面
和
j j j j
π
ˇ
C
表示与原始坐标系的
距离,在这种情况下
等于零(解释平面通过中
心)
。
剩余16页未读,继续阅读
点击了解资源详情
点击了解资源详情
117 浏览量
2021-09-17 上传
2012-02-28 上传
223 浏览量
127 浏览量
396 浏览量
191 浏览量

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







