2010年非线性PID控制算法优化数字电动舵机性能
需积分: 11 51 浏览量
更新于2024-08-12
收藏 251KB PDF 举报
该篇文章《一种数字电动舵机的非线性PID控制算法研究》发表于2010年6月的西北工业大学学报,由杨尧、王氏钢和闰杰三位作者共同研究。文章的核心内容探讨了非线性PID控制算法在数字电动舵机中的应用。传统的PID控制方法存在对内部非线性参数变化敏感,需要频繁调整参数以及对外部负载变化不稳定的缺点。为了改善这些问题,作者提出了一种创新的方法,即利用跟踪微分器来分别获取输入输出信号的位置跟踪误差和它们的微分误差,并通过非线性组合形成非线性PID控制器。
这种新型控制器设计不依赖于精确的电动舵机模型,降低了对模型参数的依赖性。作者在Matlab环境下进行了详细的仿真模拟,结果显示,采用这种算法设计的舵机控制器表现出优秀的控制性能。在动态响应方面,舵机控制具有优良的稳定性,即使面对系统内部非线性参数的不确定性以及外部负载的变化,也能保持良好的控制鲁棒性。这表明非线性PID控制策略能够有效地提高电动舵机系统的控制精度和适应性,这对于现代高性能导弹等应用领域具有重要意义,如俄罗斯的R77空空导弹。
舵机作为飞行器控制系统的关键组件,其性能直接影响整体系统的性能。通过引入非线性PID控制技术,可以有效解决电动舵机存在的非线性问题,使得控制系统能够在复杂的工作环境中稳定、高效地运行。因此,这项研究不仅提升了电动舵机的控制技术,也为推进航空航天领域的控制理论发展做出了贡献。
2010
年
6
月
第
28
卷第
3
期
西北工业大学学报
June
2010
Vo
l.
28
No.3
Journal
of
NorthwesternPolytechnical
UIÙversity
一种数字电动舵机的非线性
PID
控制算法研究
杨尧,王氏钢,闰杰
(西北工业大学航天学院,陕西西安
71
师
2)
要:文章介绍了一种非线性
PID
控制算法在数字电动舵机中的应用,利用跟踪微分器,获得输入
输出的位直跟踪误差和它们的微分误差,并对它们进行非线性组合完成非线性
PID
控制器的设计,并
在
Matlab
上进行了仿真同时进行了实际舵机控制的验证实验。仿真和实验结果表明通过该算法所设
计的舵机控制器,拉制动态性能好,稳态误差小,对系统内部非线性参数不确定性和外部负载变化有
较强的控制鲁挣障。
关键词:非线性
PID
控制,跟踪微分器,非线性组合,数字电动舵机
中图分类号:
V242.
5
文献标识码
:A
文章编号:
1000-2758
(20
1O
)03
oÛ
323
-04
舵机系统的性能对整个飞行器控制系统的性能
会产生重要的影响。现代高性能电动舵机具有高
速、大功率、微型化、高功能等优点为许多先进导弹
所采用如俄罗斯的蜡蛇
R77
空空导弹等
[1]
。
但是由于工艺、设计水平、成本等因素电动舵机
的非线性性较强,参数变化大,同时系统动态指标要
求却又不断提高,因此控制难度大,调参不易,对此
近年来,许多新理论新策略逐步应用于电动舵机系
统,并获得了良好的效果,但是一般都必须利用准确
的舵机模型或者至少部分参数准确的舵机模型,本
文在不依赖模型的情况下通过采用跟踪微分器,非
线性组合改造
PID
控制取得了较好的控制效果。
1
非线性
PID
舵机控制系统
传统电动
系统结构框图
1
所示。
~主
i
控制器问|驱动器←→
l
电机
反馈电位#
图
1
电动舵机系统框图
在传统
PID
控制中控制器直接采用输人信号输
收稿日期
:2
∞
9
-04-0
8
出信号的误差,再利用
PID
线性组合进行分段控制,
这样的控制对于内部非线性参数变化敏感,通常需
要重新调参,同时这种控制对于外部负载变化鲁棒
性差,动态特性变化大。
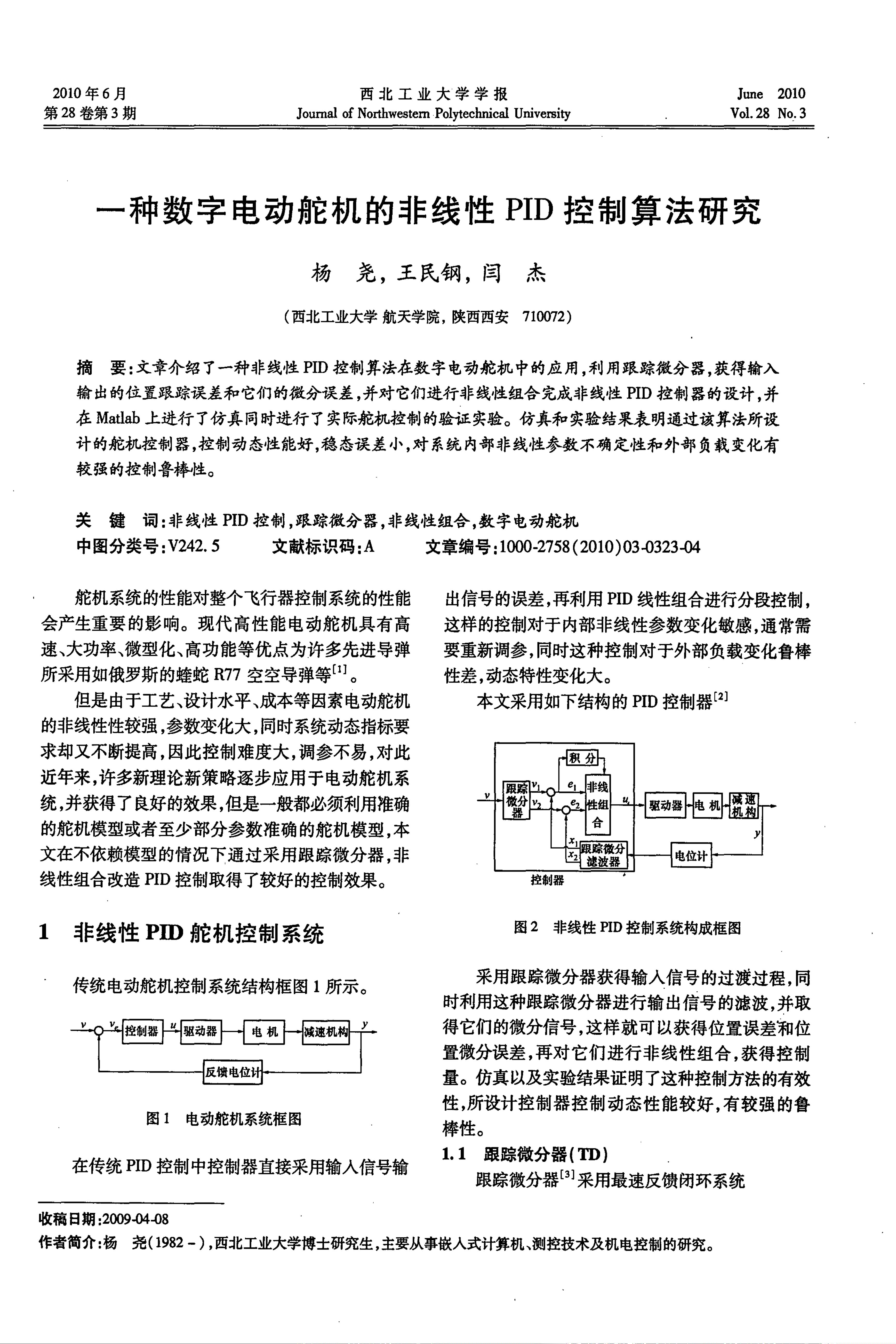
本文采用如下结构的
PID
控制器
[2]
电位计
图
2
非线性
PID
控制系统构成框图
采用跟踪微分器获得输人信号的过援过程,同
时利用这种跟踪微分器进行输出信号的滤波,并取
得它们的微分信号,这样就可以获得位置误差和位
置微分误差,再对它们进行非线性组合,获得控制
量。仿真以及实验结果证明了这种控制方法的有效
性,所设计控制器控制动态性能较好,有较强的鲁
棒性。
1.1
跟踪微分器
(TD)
跟踪微分器
[3]
采用最速反馈闭环系统
作者简介:杨
尧(1
982
-).西北工业大学博士研究生,主要从事嵌入式计算机、测控技术及机电控制的研究。
下载后可阅读完整内容,剩余3页未读,立即下载
105 浏览量
298 浏览量
137 浏览量
182 浏览量
224 浏览量
2021-09-15 上传
3021 浏览量
3021 浏览量
113 浏览量

weixin_38750406
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入解析JavaWeb中Servlet、Jsp与JDBC技术
- 粒子滤波在视频目标跟踪中的应用与MATLAB实现
- ISTQB ISEB基础级认证考试BH0-010题库解析
- 深入探讨HTML技术在hundeakademie中的应用
- Delphi实现EXE/DLL文件PE头修改技术
- 光线追踪:探索反射与折射模型的奥秘
- 构建http接口以返回json格式,使用SpringMVC+MyBatis+Oracle
- 文件驱动程序示例:实现缓存区读写操作
- JavaScript顶盒技术开发与应用
- 掌握PLSQL: 从语法到数据库对象的全面解析
- MP4v2在iOS平台上的应用与编译指南
- 探索Chrome与Google Cardboard的WebGL基础VR实验
- Windows平台下的IOMeter性能测试工具使用指南
- 激光切割板材表面质量研究综述
- 西门子200编程电缆PPI驱动程序下载及使用指南
- Pablo的编程笔记与机器学习项目探索
