51单片机控制的智能避障循迹小车设计与重力感应遥控技术
版权申诉
32 浏览量
更新于2024-06-25
收藏 3.01MB DOC 举报
"基于51单片机的避障循迹重力感应遥控智能小车设计文档"
这篇文档主要探讨了一款基于51单片机的智能小车设计,该小车具备避障、循迹和重力感应遥控功能。在当前快速发展的汽车工业背景下,智能小车的研究成为了一个热门话题,不仅在各类电子竞赛中频繁出现,也在高校的科研项目中受到重视。智能小车的设计旨在提高其适应性和自主性,通过自动避障和路径规划,实现一定程度的自动化运行。
智能化技术是未来的发展趋势,它允许设备在特定环境中自动运行,减少人为干预。与传统的遥控小车相比,智能小车通过编程实现对行驶、转向、启停和速度的控制,具有可编程和再编程的特性,更接近于机器人技术。中国在智能化领域的研究始于1978年,随着科技的进步,从模拟电路到数字电路,再到集成芯片的应用,为智能产品的开发提供了坚实的物质基础。
智能小车作为一个综合系统,整合了环境感知、决策规划、自动行驶等功能,涉及到计算机科学、传感器技术、信息处理、通信、导航、人工智能和自动控制等多个高技术领域。它是这些技术的集成体现,对于提升工业生产效率和实现自动化向智能化升级具有重要意义。
在智能车辆的研究现状方面,国外的研究起步较早,大致经历了三个阶段:从20世纪50年代的初步探索,到70年代的技术积累,再到80年代后的快速发展,实现了自动驾驶技术的逐步成熟。国外的智能车辆已经能够在特定条件下实现完全或部分自动驾驶,这包括先进的驾驶辅助系统(ADAS)和全自动驾驶系统(ADS)。
而在国内,智能车辆的研究也在不断推进,虽然起步相对较晚,但近年来取得了显著的进步,特别是在自动驾驶、车联网和智能交通系统等方面。国内的智能小车研究涵盖了从基础理论到实际应用的多个层面,包括传感器技术、算法开发、控制策略优化等,并在一些高校和研究机构中形成了较为完整的研发体系。
基于51单片机的智能小车设计是将先进的技术和理论应用于实际,推动了智能交通和自动化领域的发展。这种设计不仅提高了小车的功能性和实用性,也为未来更高级别的自动驾驶技术提供了参考和基础。通过持续的研究和创新,我们可以期待智能小车在安全、效率和便利性上带来更多的突破。
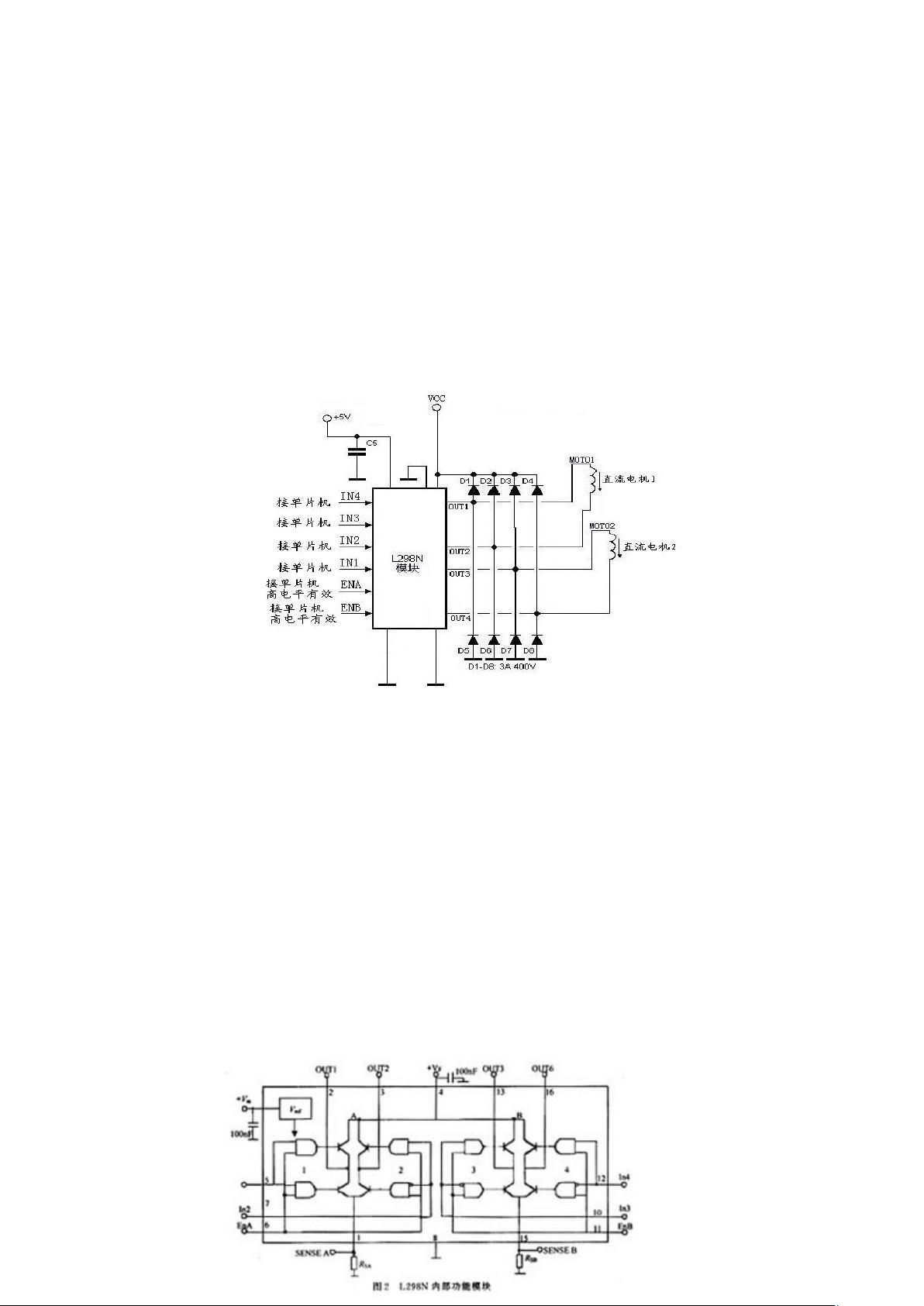
图 6 L298N 芯片
图 7 L298N 外围电路
接口说明如下示:
+5V:芯片电压 5V
VCC:电机电压,最大可接 50V
GND:共地接法
A-~D-:输出端,接电机
A~D+ :为步进电机公共端,模块上接 lVCC
EN1、EN2:高电平有效,EN1、EN2 分别为 IN1 和 IN2、IN3 和 IN4 地使能端
IN1~ IN4:输入端,输入端电平和输出端电平是对应地
L298N 地 5、7、10、12 四个引脚接到单片机上,通过对单片机地编程就可实现
两个直流电机地 PWM 调速控制,图 8 是 L298N 功能逻辑图
剩余57页未读,继续阅读
2023-07-10 上传
2023-07-06 上传
2023-05-03 上传
2023-05-03 上传
2024-10-31 上传
2024-11-07 上传
2023-05-03 上传
2024-10-31 上传

老帽爬新坡
- 粉丝: 94
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
