异质多传感器异步量测融合算法在目标跟踪中的应用
4 浏览量
更新于2024-08-30
收藏 318KB PDF 举报
"本文介绍了一种针对异质多传感器异步量测融合的高效算法,旨在提高空中目标跟踪系统的精度。在多传感器环境中,不同类型的传感器可以互补优势,通过数据融合提升跟踪效果。该算法的核心在于通过在融合中心构建伪量测方程,实现异步数据的同步处理,从而优化跟踪性能。文章详细阐述了系统模型,包括状态方程、传感器测量方程以及线性化的测量方程。此外,还提出了融合算法的具体步骤,考虑了多个传感器在不同时间间隔内产生的不同时序量测,并给出了量测集合的表达方式。"
在多传感器目标跟踪系统中,异质传感器(即具有不同特性的传感器)的使用至关重要。它们能够提供互补的信息,比如距离、角度等,以更全面地捕捉到空中目标的状态。为了整合这些不同类型的传感器数据,文章提出了一种创新的异步量测融合算法。首先,算法通过伪量测方程将异步数据同步化,使得各个传感器的测量可以在同一时间基准上进行比较和处理。然后,利用线性化技术处理非线性的测量方程,简化计算并降低误差。状态转移矩阵和过程噪声转移矩阵在此过程中起到了关键作用,它们描述了目标状态随时间的演变和随机噪声的影响。
系统模型基于离散时间线性系统,状态方程描述了目标从一个时间步到下一个时间步的动态变化。测量方程则反映了传感器如何获取目标信息,通常是非线性的,但在泰勒级数展开后可以近似为线性方程,便于进行数据融合。在实际应用中,传感器的测量可能包括斜距、方位角和俯仰角,这些量测经过坐标转换后可用于目标定位。
融合算法部分,文章假设了N个传感器在不同时间间隔内产生不同数量的量测。对于那些在特定时间间隔内未提供量测的传感器,算法也考虑了这种情况。通过定义量测时间与融合周期的间隔,构建了单个融合间隔内的量测集合,并对所有传感器的量测进行了综合表示。
这种异质多传感器异步量测融合算法提供了一个有效的方法,用于整合不同类型的传感器数据,提高跟踪系统的精度,特别是在复杂和动态的环境中。通过理论分析和计算机仿真的验证,该算法能够克服异步数据融合的挑战,增强多传感器系统的整体性能。
一种有效的异质多传感器异步量测融合算法一种有效的异质多传感器异步量测融合算法
在多传感器目标跟踪系统中,由于异质传感器能实现优势互补,将其数据进行融合,可提高对空中目标的跟踪
精度。
1 引言引言
在多
异质
本文从建立伪量测方程的角度,提出了一种异质多传感器的异步量测融合算法,该算法是通过在融合中心建立伪量测方程使各
传感器的数据同步,然后利用同步的思想进行处理,最后通过计算机仿真进行了验证。
2 系统模型系统模型
不失一般性,以在球面坐标系中运动的目标为例进行分析,则离散时间线性系统的状态方程为:
X(k+1)=F(k+1,k)X(k)+Γ(k+1,k)V(k) (1)
其中,X(k)为k时刻目标的状态向量;kF(k+1,k)为状态转移矩阵;Γ(k+1,k)为过程噪声转移矩阵;V(k)是零均值,高斯白噪
声序列,其协方差阵为Q(k)。
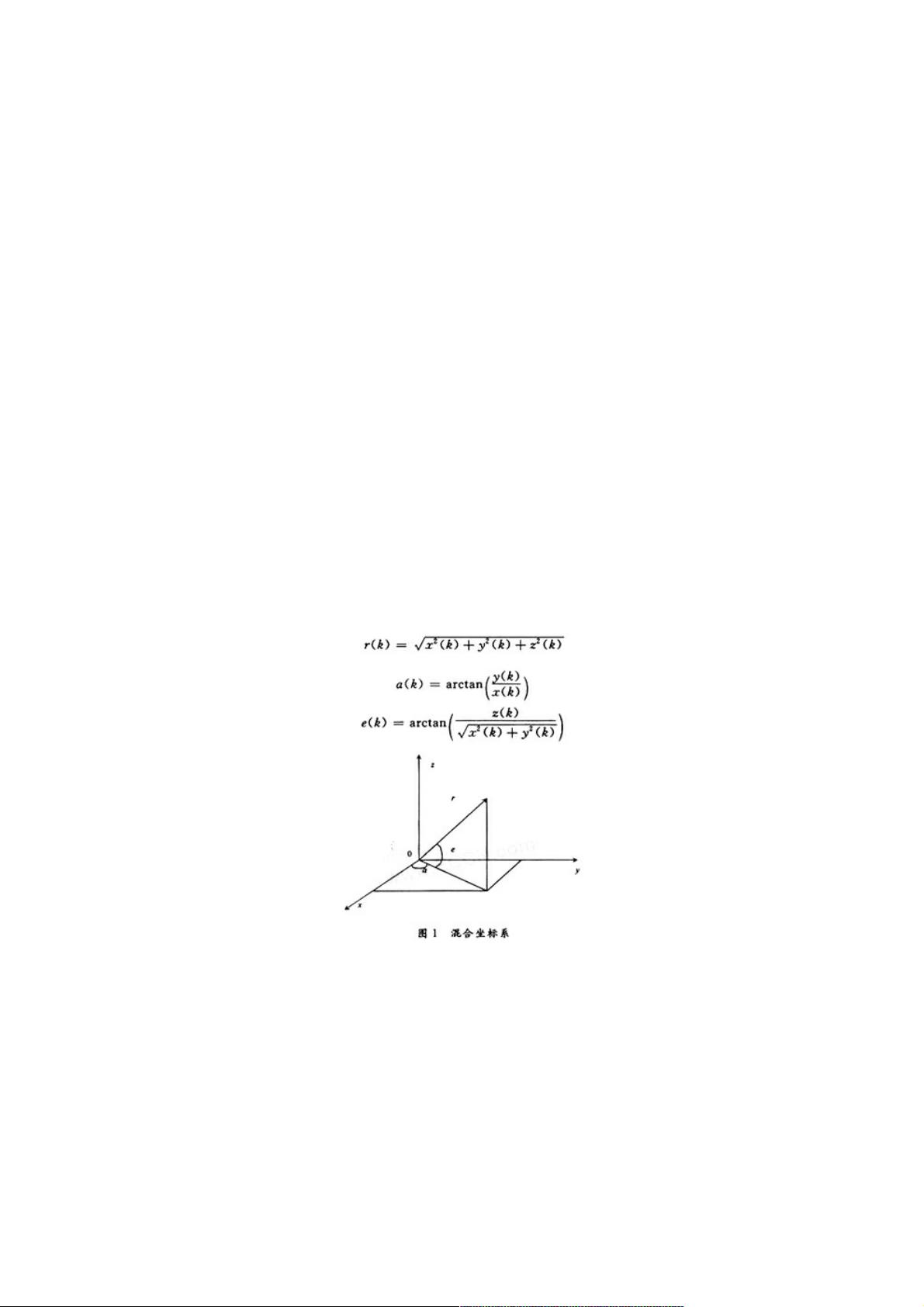
在实际情况下,传感器得到的是三维球坐标系或二维极坐标系的目标量测,即包括斜距r、方位角a和俯仰角e。假设某一传感
器的测量方程为:
Z(k)=h(X(k))+W(k) (2)
其中,W(k)是k时刻的测量高斯白噪声,其相互独立且协方差为R(k),量测向量Z(k)包括斜距r(k)、方位角a(k)、俯仰角e(k),
坐标转换如图2所示,由其定义可得:
3 测量方程的线性化测量方程的线性化
由于测量方程(2)是一个非线性方程,可以利用泰勒级数展开,对其进行线性化,展开围绕者预测状态X(k/k-1)进行,表示如
下:
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-01-19 上传
2013-01-24 上传
2021-05-09 上传
2021-04-02 上传
2021-05-09 上传

weixin_38605538
- 粉丝: 4
- 资源: 991
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
