异质多传感器异步量测融合算法验证与应用
48 浏览量
更新于2024-08-28
收藏 257KB PDF 举报
"异质多传感器的异步量测融合算法在目标跟踪系统中的应用,旨在提高跟踪精度。通过融合不同类型的传感器数据,如3D雷达、2D雷达、被动雷达、测高雷达和ESM,可以获取更全面的目标状态估计。文献提及了2D主动雷达与红外传感器的融合方法,以及虚拟融合法和并行滤波方法,但这些方法通常需要传感器数据同步。本文提出了一种基于伪量测方程的异步融合算法,通过在融合中心创建伪量测来实现异步数据同步,从而进行处理。系统模型以球面坐标系中的目标运动为例,描述了状态方程和噪声处理。"
在多传感器目标跟踪系统中,异质传感器信息融合技术至关重要。这种融合能够结合不同传感器的优势,如3D雷达提供的全面三维信息,2D雷达的二维位置信息,被动雷达的方位和俯仰角度,测高雷达的俯仰信息,以及ESM的方位数据,共同提升对目标状态的估计精度。文献中的研究展示了2D主动雷达和红外传感器的融合策略,利用IMM/PDAF序贯滤波器来处理高机动目标。另外,虚拟融合法通过调整采样率使得不同传感器数据同步,而并行滤波方法则适用于已同步的数据。
然而,对于异步数据的融合,现有的方法往往受限于传感器数据同步的挑战。本文提出的算法则尝试从伪量测方程的构建出发,解决这一问题。通过在数据融合中心创建伪量测,使得各个传感器的数据能够在逻辑上达到同步状态,随后进行融合处理。这种方法不仅解决了异步数据融合的难题,而且理论上可以适应各种异质传感器的组合,提高了系统的灵活性和适应性。
系统模型描述了一个离散时间线性系统,状态转移由状态转移矩阵控制,并考虑了过程噪声的影响。这种模型为理解异步量测融合算法如何在实际环境中运作提供了基础。在实际操作中,传感器可能受到各种因素的影响,导致测量存在误差或不精确,因此,有效的融合算法必须能够处理这些不确定性,确保跟踪性能的稳定和精确。
本文提出的异步量测融合算法为异质传感器数据融合提供了一个创新的解决方案,它不仅适用于不同传感器的异步数据,还能在保证跟踪精度的同时,增强系统的整体性能。这种技术对于现代多传感器跟踪系统的设计和优化具有重要的理论和实践意义。
一种异质多传感器的异步量测融合算法验证一种异质多传感器的异步量测融合算法验证
在多传感器目标跟踪系统中,由于异质传感器能实现优势互补,将其数据进行融合,可提高对空中目标的跟踪
精度。异质传感器信息融合是数据融合实际应用中的一个重要内容,因为在实际的系统中,经常遇到利用3D雷
达(测量值为距离、方位和俯仰)、2D雷达(距离和方位)、被动雷达(方位和俯仰)、测高雷达(俯仰)和
ESM(方位)等传感器对目标进行跟踪,利用这些传感器进行融合可获得更、更完全的目标状态估计。 异
质多传感器融合是数据融合中一个重要内容,文献[1]研究了利用2D主动雷达和红外传感器对高机动目标进行
跟踪,提出基于IMM/PDAF的序贯滤波融合方法。文献[2-4]提出一种虚拟融合法,由于该算法首先是对采
样
在多传感器目标跟踪系统中,由于异质传感器能实现优势互补,将其数据进行融合,可提高对空中目标的跟踪精度。异质
传感器信息融合是数据融合实际应用中的一个重要内容,因为在实际的系统中,经常遇到利用3D雷达(测量值为距离、方位
和俯仰)、2D雷达(距离和方位)、被动雷达(方位和俯仰)、测高雷达(俯仰)和ESM(方位)等传感器对目标进行跟
踪,利用这些传感器进行融合可获得更、更完全的目标状态估计。
异质多传感器融合是数据融合中一个重要内容,文献[1]研究了利用2D主动雷达和红外传感器对高机动目标进行跟踪,
提出基于IMM/PDAF的序贯滤波融合方法。文献[2-4]提出一种虚拟融合法,由于该算法首先是对采样率高的传感器数据
进行二乘压缩,使之与另一个传感器的数据同步,该算法中各传感器采样率的比需满足一定的条件,文献[5]研究了一种并
行滤波方法。由于该算法是一种同步融合算法,对于异步数据首先要进行同步化。
本文从建立伪量测方程的角度,提出了一种异质多传感器的异步量测融合算法,该算法是通过在融合中心建立伪量测方程
使各传感器的数据同步,然后利用同步的思想进行处理,通过计算机仿真进行了验证。
2 系统模型
不失一般性,以在球面坐标系中运动的目标为例进行分析,则离散时间线性系统的状态方程为:
X(k+1)=F(k+1,k)X(k)+Γ(k+1,k)V(k) (1)
其中,X(k)为k时刻目标的状态向量;kF(k+1,k)为状态转移矩阵;Γ(k+1,k)为过程噪声转移矩阵;V(k)是零
均值,高斯白噪声序列,其协方差阵为Q(k)。
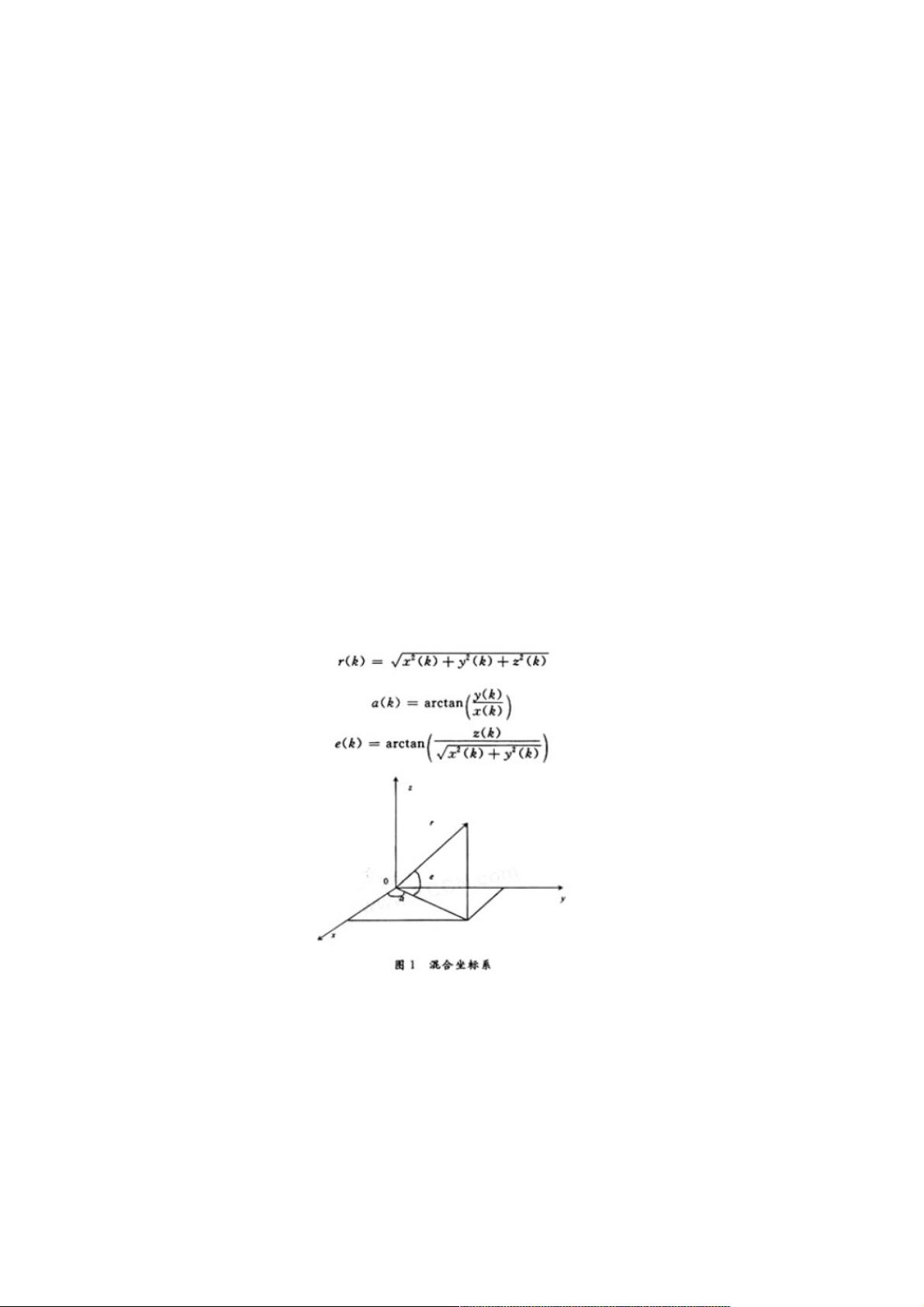
在实际情况下,传感器得到的是三维球坐标系或二维极坐标系的目标量测,即包括斜距r、方位角a和俯仰角e。假设某一
传感器的测量方程为:
Z(k)=h(X(k))+W(k) (2)
其中,W(k)是k时刻的测量高斯白噪声,其相互独立且协方差为R(k),量测向量Z(k)包括斜距r(k)、方位角
a(k)、俯仰角e(k),坐标转换如图2所示,由其定义可得:
3 测量方程的线性化
由于测量方程(2)是一个非线性方程,可以利用泰勒级数展开,对其进行线性化,展开围绕者预测状态X(k/k-1)进
行,表示如下:
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
273 浏览量
123 浏览量
2020-10-25 上传
点击了解资源详情
108 浏览量
2021-05-09 上传
点击了解资源详情
326 浏览量

weixin_38545959
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- diskusage工具发现磁盘空间占用大户
- 易语言实现按钮滑动效果及延时优化技巧
- 易语言实现ASM取启动时间的核心源码
- PSCAD线路故障仿真模型:学习与模型搭建指南
- HTML压缩包子文件技术探讨
- Vagrant上部署LAPP环境示例教程
- Kubeflow 1.2.0版本文件压缩包介绍
- MATLAB实现的Crowding模型分析工具包
- zmote小部件PCB设计与制作教程:原理图与Gerber文件
- MATLAB多线主成分分析PCA代码实现与应用
- 全面技术项目源码共享:ASP+ACCESS即时查询系统
- zlib 1.2.11版本压缩包免费下载指南
- 华为交换机Web管理文件下载指南
- lttcpp-xls-数据集: 训练集文件解析与应用
- Jenkins-PHP Docker:轻松构建PHP环境的Docker模板
- Heka插件开发:解耦与指标集成的探索
