NXT蓝牙机器人:硬件、软件与编程入门
版权申诉
115 浏览量
更新于2024-06-27
收藏 7.56MB DOCX 举报
"蓝牙(NXT)机器人编程指导文档主要涵盖了蓝牙机器人系统的软件和硬件组成部分,包括NXT控制器、伺服电机、传感器以及蓝牙通讯模块的详细信息,并介绍了如何为蓝牙机器人编写简单程序。"
在深入探讨蓝牙(NXT)机器人编程之前,我们首先需要理解其核心组件。NXT控制器是机器人的大脑,它由32位ARM7处理器和8位AVR协处理器构成,具备蓝牙无线通信和USB2.0通讯能力。控制器内部存储空间充足,能够处理来自各种传感器的数据,并通过伺服电机执行指令。
伺服电机是NXT机器人的执行机构,它们配备内置角度传感器,能精确测量速度和距离,允许机器人在运行时进行速度校准并实现精确到1度的控制。电机的结构设计便于安装和固定,同时,角度传感器的使用确保了电机转动的准确性。
NXT传感器是机器人感知环境的关键,如触动传感器,它继承了RCX传感器的功能,前端的十字孔设计便于制作缓冲器。除此之外,NXT系统还支持多种其他类型的传感器,如颜色、超声波、光线和触碰传感器,这些传感器为机器人提供了丰富的感知能力。
蓝牙模块是NXT机器人与外部设备通信的桥梁,它遵循蓝牙2.0(CLASS II)规范,支持SPP(串行端口定义),具有至少10米的传输范围,最高可达30米或更远。蓝牙连接具有高安全性,使得机器人可以与手机、电脑等设备无缝交互,实现远程控制或数据交换。
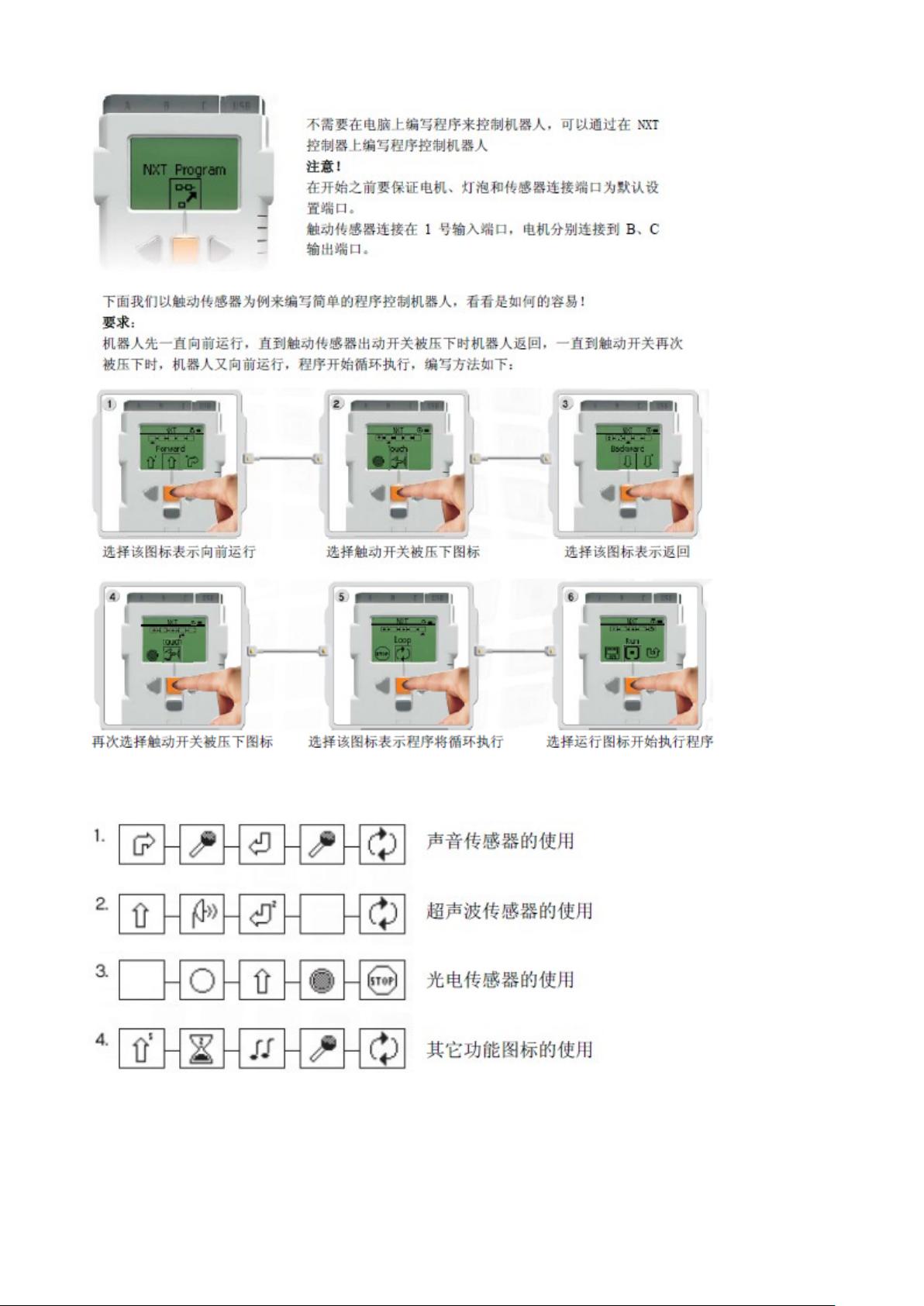
编写NXT机器人的程序通常涉及使用NXT-G编程语言,这是一种图形化编程环境,用户可以通过拖拽代码块来构建逻辑,降低了编程的入门难度。一个简单的程序可能包括初始化控制器、设置电机速度、读取传感器数据和根据条件执行特定动作等步骤。
在实际应用中,开发者可以利用这些基础构建复杂的机器人行为,例如路径规划、避障、追踪目标或执行特定任务。通过不断学习和实践,你可以掌握NXT机器人的编程技巧,创造出更加智能和自主的机器人系统。
10
我们可以将在NXT 上编写的程序进行保存,程序将被自动保存在“NXT Files”中,以后可以在该文件
夹中打开保存的程序。现在来编写下以下程序,体会如何在程序中使用各种传感器
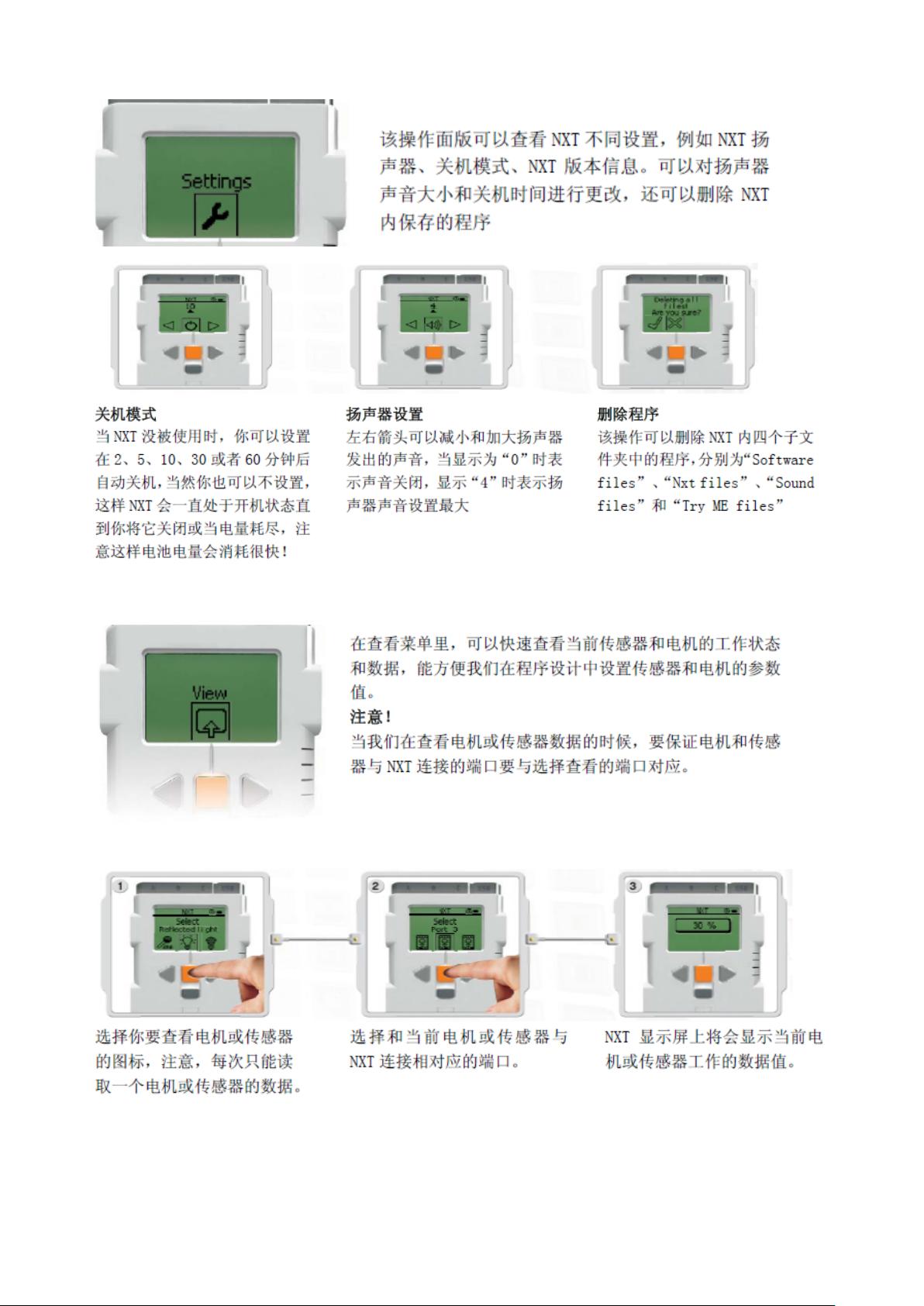
4.NXT 主菜单-Settings
剩余54页未读,继续阅读
602 浏览量
点击了解资源详情
218 浏览量
218 浏览量
2022-06-30 上传
258 浏览量
2023-02-16 上传
184 浏览量
2022-06-30 上传

猫一样的女子245
- 粉丝: 233
 我的内容管理
展开
我的内容管理
展开







最新资源
- 实时构建CreepyPointers存储库的过程直播
- 利用Optional类优化空指针异常处理方法
- Android菜单演示:选项、上下文与子菜单详解
- Proyecto1_web:探索HTML的基础实践
- Apache Spark 3.0.1 版本发布详情
- OpenGL编程教程光盘源码解析指南
- 获取最新版jquery 1.8.2:下载源码与压缩版
- 掌握SWFTools:一站式处理Flash SWF文件工具包
- 探索LabVIEW 2015评估版:测试平台的革新者
- 时间序列预测算法集:MATLAB实现与分析
- IE9完整版离线安装包下载指南
- jQuery选择结果管理技巧与赚钱项目开发
- ExtJS 4新手权限管理PHP后台示例
- Android日历实现及公历农历节日展示功能
- Flutter应用开发:构建高效跨平台APP
- 蓝牙CSR BlueLab xIDE编译器与库函数使用教程
