乐高NXT机器人编程入门:硬件系统详解
需积分: 16 190 浏览量
更新于2024-07-15
收藏 7.19MB DOC 举报
本篇文档是关于乐高(NXT)机器人的编程指南,详细介绍了NXT软件和硬件系统的基础知识。NXT机器人是一个集成了蓝牙无线通讯、高性能处理器、伺服电机、多种传感器的教育型机器人平台。以下是主要知识点的详细解析:
1. **NXT硬件系统**
- **NXT控制器**:作为核心组件,它搭载了32位ARM7处理器AT91SAM7S256,提供了强大的处理能力,具有256K闪存和64K静态内存,主频高达48MHz。此外,还有一个8位AVR处理器ATmega48,负责低速任务,有4K闪存和512字节静态内存,主频为9MHz。
- **蓝牙无线通讯**:支持蓝牙2.0+EDR规范,便于远程控制和数据交换,且内置47K RAM和8Mbit闪存用于存储程序。
- **输入/输出端口**:包括4个数字接口和1个高速端口,支持多种通信标准,如IEC61158 TYPE-4/EN50170。
- **显示屏**:100x64像素的黑白屏幕,用于显示机器人状态信息。
- **扬声器**:8位分辨率,支持2-16kHz采样率,可用于音频反馈。
- **电源**:采用6节AA电池或1400mA锂电池板供电。
2. **NXT伺服电机**:
- 内置角度传感器,可精确测量速度和距离,实现精细控制,例如设置电机转动180度时实际转动半圈。
- 电机设计方便固定和安装,具有高精度,控制精度可达1度。
3. **NXT传感器**:
- **触动传感器**:与RCX版本相似,但带有十字孔,便于制作缓冲器,提高了使用灵活性。
- **光电传感器**:能够检测环境光强度,甚至区分颜色,通过红外发射管反射光读取值。
- **声音传感器**:测量普通声音的分贝等级,用于声音感应和分析。
第1章主要让读者对NXT系统的整体架构有深入理解,并熟悉其组成部分的功能和特性。通过这些硬件介绍,学习者可以开始构思如何利用这些部件进行程序设计,实现机器人的各种动作和功能。接下来的章节可能会逐步引导读者学习如何使用NXT SDK编写程序,设置传感器触发事件,以及如何通过蓝牙与其他设备交互。整个过程旨在培养孩子们的逻辑思维、问题解决能力和创新精神。

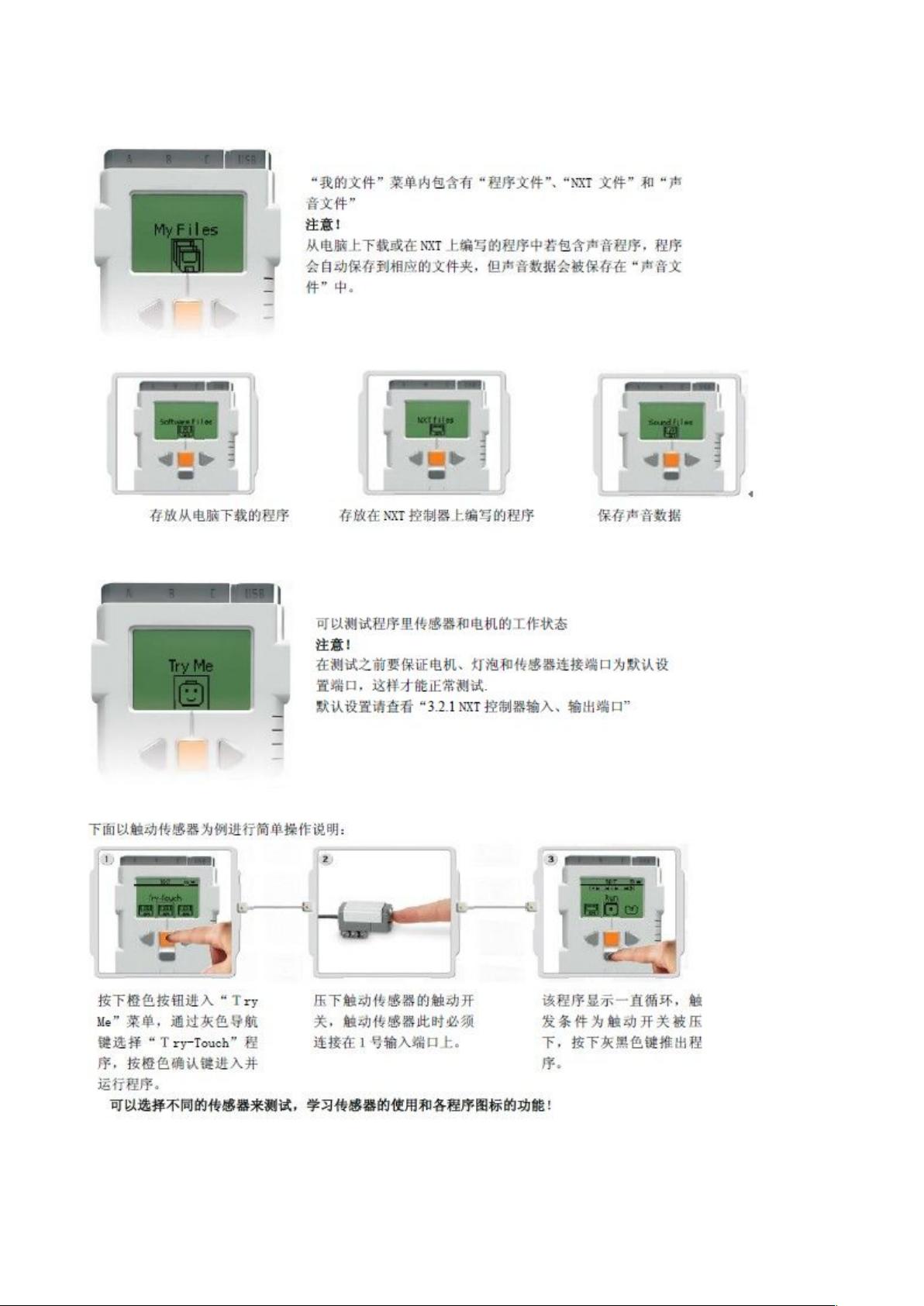
1.3.3 菜单详解
剩余43页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-06-30 上传
2021-10-02 上传
2023-07-13 上传
2023-07-13 上传
2021-10-07 上传
2023-07-13 上传

Mendax1234
- 粉丝: 6
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
