动态规划解决算法设计难题:斐波那契数列、数字三角形与矩阵优化
需积分: 0 183 浏览量
更新于2024-08-05
收藏 595KB PDF 举报
第四章算法设计与分析深入探讨了递归、动态规划及优化策略在解决实际问题中的应用。本章涉及的内容包括:
1. 斐波那契数列计算:递归式F(n)=F(n-1)+F(n-2)定义了这个经典的数列,但直接计算会导致重复子问题。由于具有优化子结构,可以通过动态规划方法避免重复,使用一个数组保存已计算的值。动态规划算法存储中间结果,时间复杂性为O(n),避免了指数级的增长。伪代码可能如下:
```
F[0] = 1
F[1] = 1
for i from 2 to n:
F[i] = F[i-1] + F[i-2]
return F[n]
```
2. 数字三角形问题:这个问题涉及到寻找最大路径和,递推方程可通过自底向上策略得出,通常是类似于DP表格的形式。伪代码可能包括动态规划的状态转移,时间复杂度为O(n^2)。递推方程示例:
```markdown
dp[i][j] = max(dp[i-1][j], dp[i][j-1]) + triangle[i][j]
```
其中dp[i][j]表示从根节点到达位置(i, j)的最大路径和。
3. 二进制矩阵最大子方阵全1问题:通过二维动态规划,记录当前行和列的连续1子序列长度。递归方程可能为:dp[i][j] = dp[i-1][j-1] + A[i][j] (如果A[i][j]=1),否则dp[i][j] = max(dp[i-1][j], dp[i][j-1])。时间复杂度为O(n^2)。
4. 石子归并问题:设计一个二维动态规划,状态为dp[i][j]表示将前i堆石子合并成j堆的最小得分。递归方程可能包含当前堆石子数量对得分的影响。时间复杂度同样为O(n^2)。
5. k类点聚类问题:这是一个排序后分治问题,可以使用贪心策略结合动态规划来求解。递归方程可能基于划分点的选择和成本计算,时间复杂度取决于分割点的数量,可能为O(n log k)。目标是最小化总成本函数,通过不断分割和调整集合以实现最优划分。
这些算法都展示了递归和动态规划在优化算法性能和减少重复计算方面的关键作用,是理解和设计高效算法的重要组成部分。通过理解这些问题,学习者可以更好地掌握如何将理论知识应用于解决实际问题。
算法设计与分析第四章学习指南
视频
https://www.icourse163.org/course/HIT-356006
(算法设计与分析(基础篇) 第四讲)
https://mooc.study.163.com/learn/1000005000?tid=1000005001#/learn
/content
(算法设计与分析(进阶篇)第二讲,第三讲)
阅读
算法导论(第三版) 第 15 章,第 35.5 节,第 25 章
练习题
1. 满足递归式 F(n)=F(n-1)+F(n-2)和初始值 F(0)=F(1)=1 的数列称为斐波那契数列。考虑如何
计算该数列的第 n 项 F(n)。( 1)说明根据递归式直接完成计算,将有子问题重复求解;
(2)说明该问题具有优化子结构;(3)写出求解 F(n)的动态规划算法,并分析算法的
时间复杂性。
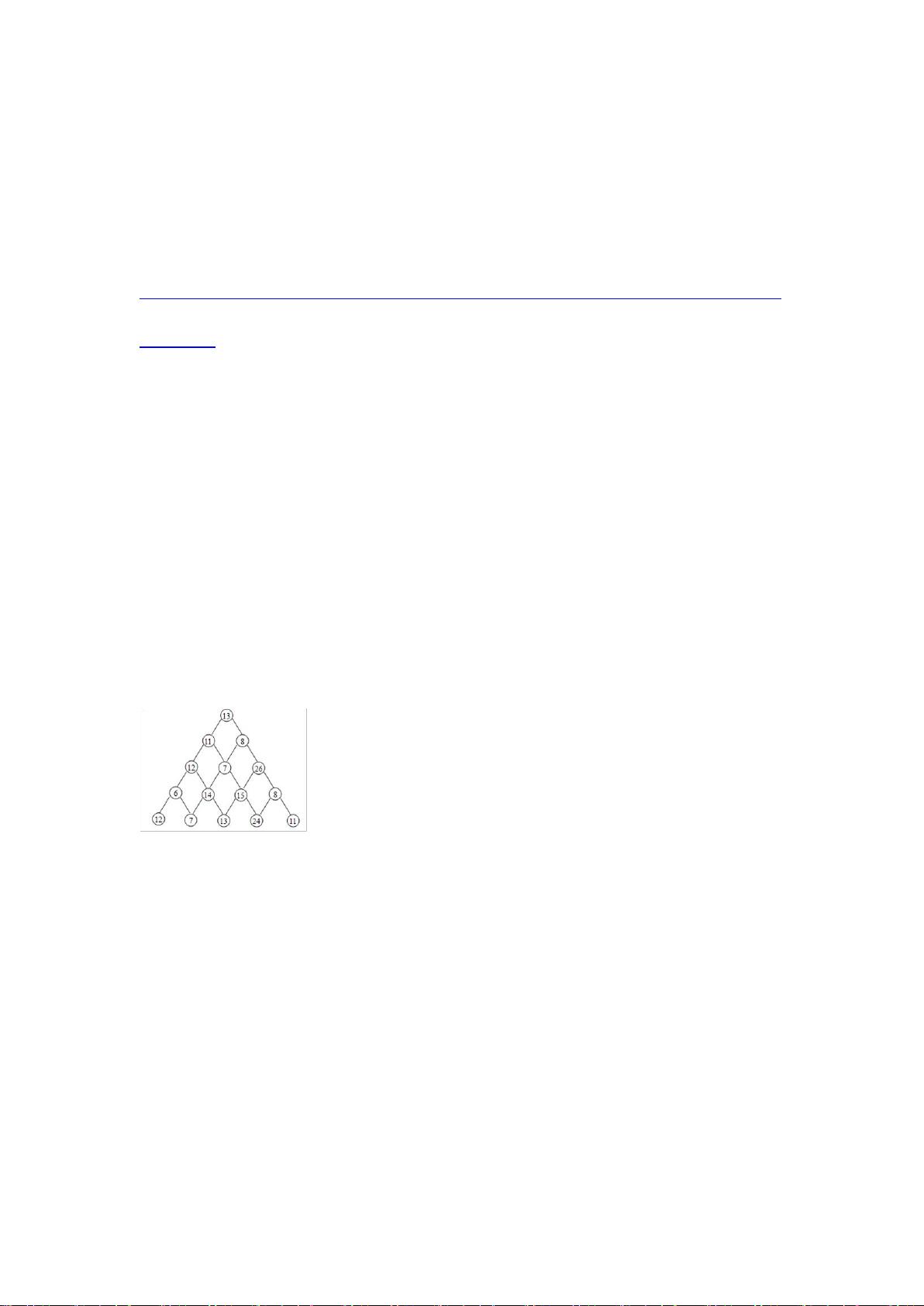
2. 数字三角形问题:设有一个三角形的数塔,顶点为根结点,每个结点有一个整数值。从
顶点出发,可以向左走或向右走,如图所示:
要求从根结点开始,请找出一条路径,使路径之和最大,只要输出路径的和。
要求:(1) 写出递推方程;(2)写出算法伪代码;(3) 分析算法的时间复杂度。
3. 给定一个 n×n 的矩阵 A,矩阵中的元素只取 0 或者 1。设计一个动态规划算法,求解
得到 A 中元素全是 1 的子方阵使其阶数达到最大值。要求写出伪代码、递归方程并
分析算法的时间复杂度。
4. 石子归并问题:在一个圆形操场的四周摆放着 n 堆石子,现要将石子有次序地合并成一
堆。规定每次只能选择相邻的两堆石子合并成新的一堆,并将新一堆石子数记为该次合
并的得分。试设计一个动态规划算法,计算出将 n 堆石子合并成一堆的最小得分和最大
得分,要求列出递归方程,写出算法的伪代码并分析算法的计算复杂性。
5. 我们考虑将数轴上的 n 个点聚成 k 类的问题。
输入:n 个从小到大的不同实数 x
1
, x
2
, …, x
n
表示 n 个不同点,一个参数 kn.
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-08-03 上传
2022-08-03 上传
2022-08-03 上传
2009-03-24 上传
2022-08-03 上传
2020-05-25 上传









