ROS包转化为可安装的Debian包教程
需积分: 11 50 浏览量
更新于2024-09-08
收藏 643KB DOCX 举报
本教程将指导如何从ROS(Robot Operating System)包中生成可安装的.deb(Debian软件包)格式,使其能够在Debian系统上轻松部署。该指南基于一篇博客文章,链接为<http://blog.csdn.net/freeleons/article/details/78279563>,并对其格式进行了美化,旨在帮助初学者理解和实践ROS包的打包与发布流程。
首先,假设你已经按照ROS入门教程创建了名为`beginner_tutorial`的包,可以通过官方教程<http://wiki.ros.org/ROS/Tutorials>获取基础。你也可以参考zip包文件`beginner_tutorials.tar.gz`和`beginner_tutorials_cpp.tar.gz`,通过实际操作来熟悉整个过程。
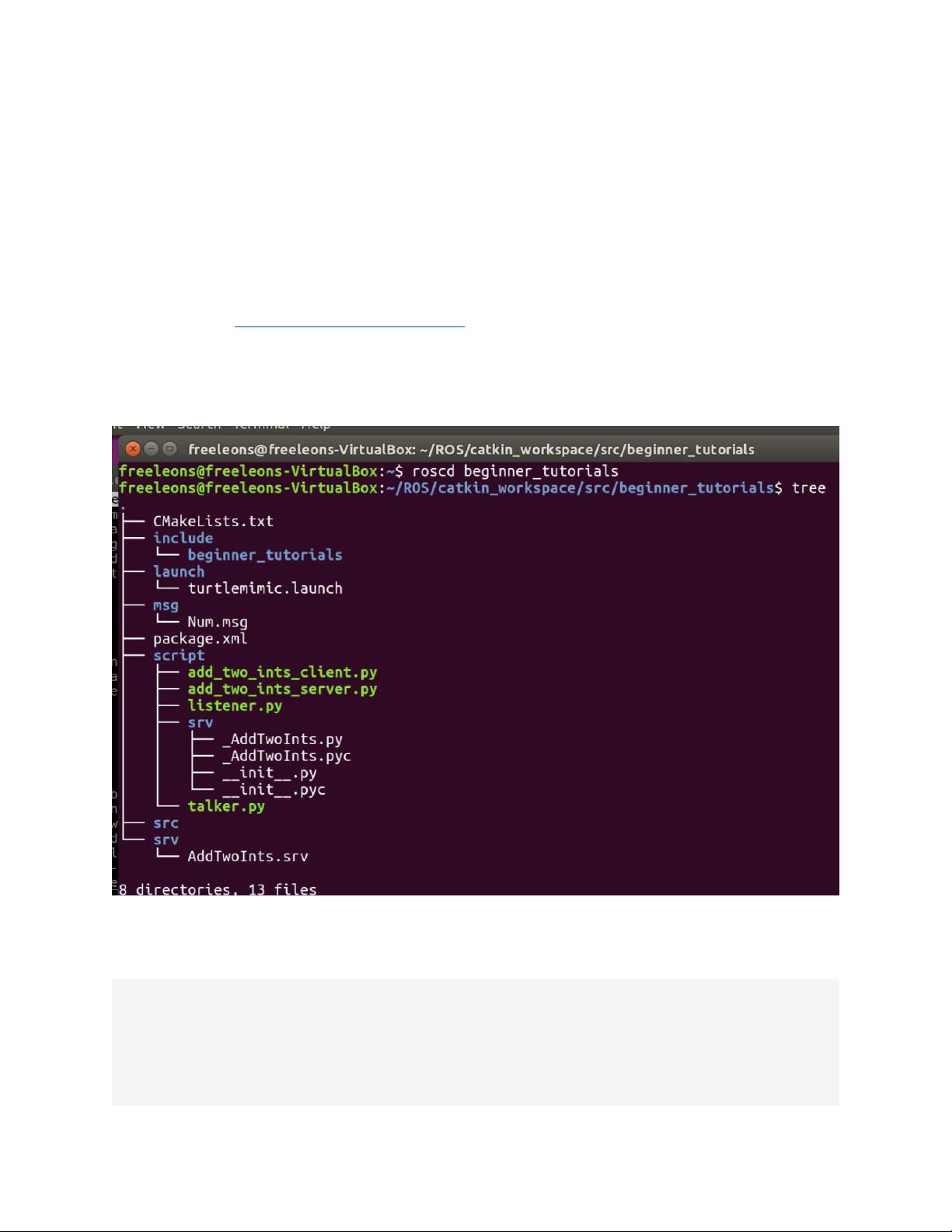
在打包过程中,特别关注Python脚本的处理。在`beginner_tutorials` ROS包的根目录下,文件结构通常如下:
1. `script`文件夹包含了Python源代码,这些文件需要添加到生成的.deb包中以供执行。为此,你需要在`CMakeLists.txt`文件中添加以下代码段,使用`catkin_install_python`函数:
```cmake
FILE(GLOB openag_script_files "${CMAKE_CURRENT_SOURCE_DIR}/script/*.*")
FILE(GLOB openag_subdirectory_script_files "${CMAKE_CURRENT_SOURCE_DIR}/script/srv/*.*")
catkin_install_python(PROGRAMS
${openag_script_files}
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION})
catkin_install_python(PROGRAMS
${openag_subdirectory_script_files}
DESTINATION "${CATKIN_PACKAGE_BIN_DESTINATION}/srv")
```
如果不包含上述代码,最终生成的.deb包可能不会包含Python脚本,这会导致在Debian系统上无法正常使用这些脚本。
CMakeLists.txt文件是构建工具的关键配置文件,通过它定义了编译规则和安装目标。这段代码的作用是找到`script`文件夹中的Python源文件和服务端口文件,并将其安装到`.deb`包的`bin`目录和`srv`子目录下,以便在目标系统上正确运行。
生成.deb包的过程通常涉及以下步骤:
- 使用`catkin`工具链,确保所有依赖项已安装且构建环境设置正确。
- 在`catkin_make`或`catkin_package`命令中指定生成.deb包的选项。
- 完成构建后,`dpkg-deb`工具可以用于创建.deb文件,或者集成到自动化构建系统如Bloom中,以便更方便地管理和分发。
理解并实施这个过程对于任何希望在ROS环境中发布和分享自己的Python代码包至关重要,因为它确保了包的可移植性和系统的兼容性。通过遵循此方法,你可以轻松地将ROS包转化为Debian包,让其他Debian用户能够方便地安装和使用你的ROS功能。
Generate deb installable package
from ROS Package
Section 1, Package beginner_tutorial into Debian File
!! "!#$%
!!$!!$&'!
Install Python !les using deb
(&
%&)*+!'
FILE(GLOB openag_script_files "${CMAKE_CURRENT_SOURCE_DIR}/script/*.*")
FILE(GLOB openag_subdirectory_script_files
"${CMAKE_CURRENT_SOURCE_DIR}/script/srv/*.*")
catkin_install_python(PROGRAMS
${openag_script_files}
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION})
下载后可阅读完整内容,剩余8页未读,立即下载
2019-11-28 上传
2019-08-23 上传
2021-08-04 上传
2021-01-30 上传
2021-03-14 上传
2024-08-24 上传
2021-05-14 上传
2023-07-19 上传
2023-04-14 上传


freeleons
- 粉丝: 1
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
