
Model Platform Motion Using Trajectory Objects
This topic introduces how to use three dierent trajectory objects to model platform trajectories, and
how to choose between them.
Introduction
Sensor Fusion and Tracking Toolbox provides three System objects that you can use to model
trajectories of platforms including ground vehicles, ships, aircraft, and spacecraft. You can choose
between these trajectory objects based on the available trajectory information and the distance span
of the trajectory.
• waypointTrajectory — Denes a trajectory using a few waypoints in Cartesian coordinates
that the trajectory must pass through. The trajectory assumes the reference frame is a xed
North-East-Down (NED) or East-North-Up (ENU) frame. Since the trajectory interpolation
assumes that the gravitational acceleration expressed in the trajectory reference frame is
constant, waypointTrajectory is typically used for a trajectory dened within an area that
spans only tens or hundreds of kilometers.
• geoTrajectory — Denes a trajectory using a few waypoints in geodetic coordinates (latitude,
longitude, and altitude) that the trajectory must pass through. Since the waypoints are expressed
in geodetic coordinates, geoTrajectory is typically used for a trajectory from hundreds to
thousands of kilometers of distance span.
• kinematicTrajectory — Denes a trajectory using kinematic properties, such as acceleration
and angular acceleration, expressed in the platform body frame. You can use
kinematicTrajectory to generate a trajectory of any distance span as long as the kinematic
information of the trajectory is available. The object assumes a Cartesian coordinate reference
frame.
The two waypoint-based trajectory objects (waypointTrajectory and geoTrajectory) can
automatically calculate the linear velocity information of the platform, but you can also explicitly
specify the linear velocity using the Velocity property or a combination of the Course,
GroundSpeed, and ClimbRate properties.
The trajectory of a platform is composed of rotational motion and translational motion. By default, the
two waypoint-based trajectory objects (waypointTrajectory and geoTrajectory) automatically
generate the orientation of the platform at each waypoint by aligning the yaw angle with the path of
the trajectory, but you can explicitly specify the orientation using the Orientation property.
Alternately, you can use the AutoPitch and AutoBank properties to enable automatic pitch and roll
angles, respectively. For kinematicTrajectory, you need to use the Orientation property and
the angular velocity input to specify the rotational motion of the trajectory.
waypointTrajectory
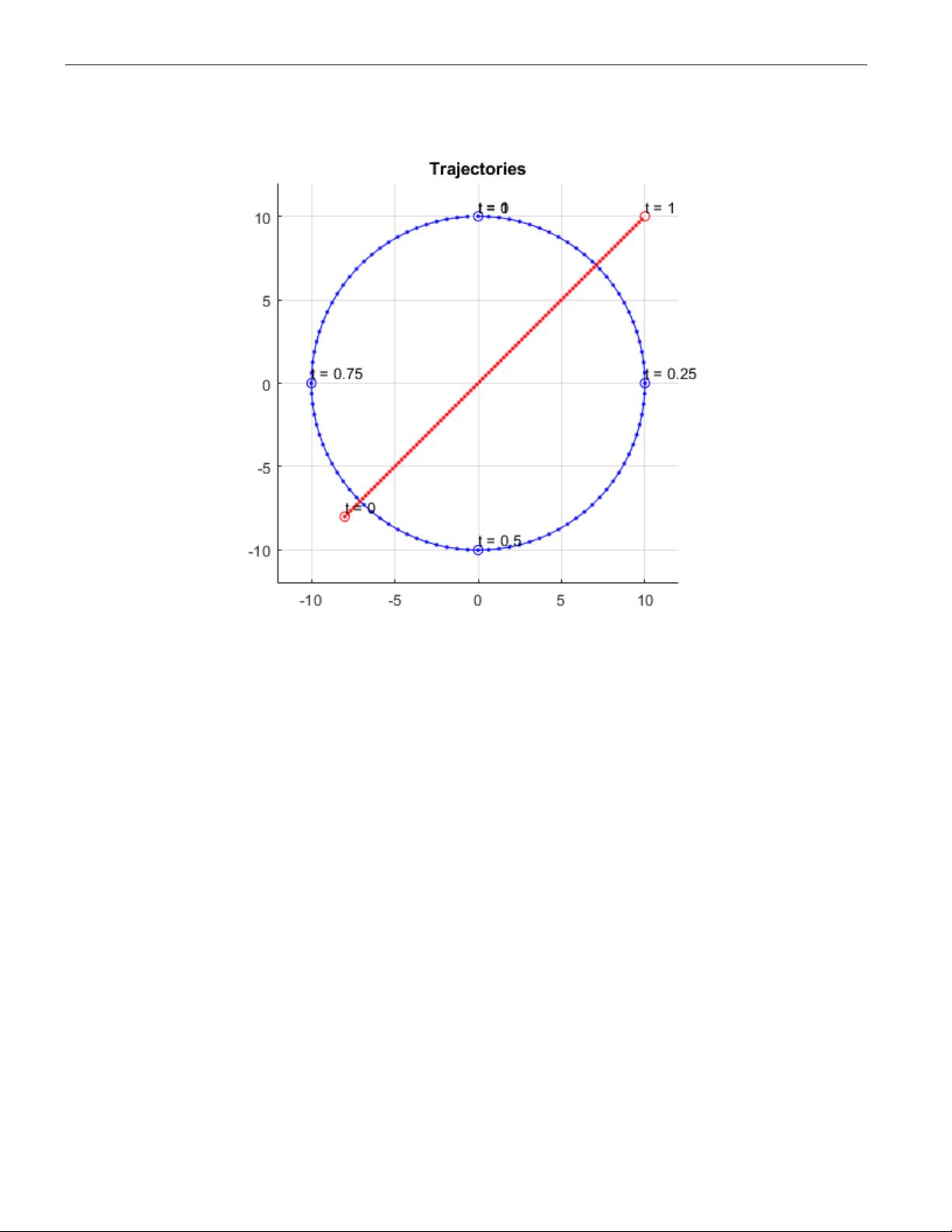
The waypointTrajectory System object denes a trajectory that smoothly passes through
waypoints expressed in Cartesian coordinates. Generally, you can use waypointTrajectory to
model vehicles travelling within hundreds of kilometers. These vehicles include automobiles, surface
marine craft, and commercial aircraft (helicopters, planes, and quadcopters). You can choose the
reference frame as a xed ENU or NED frame using the ReferenceFrame property. For more details
on how the object generates the trajectory, see the “Algorithms” section of waypointTrajectory.
Model Platform Motion Using Trajectory Objects
1-9



 我的内容管理
展开
我的内容管理
展开









