库卡机器人外部自动运行配置与接口控制详解
需积分: 28 88 浏览量
更新于2024-08-05
1
收藏 971KB PDF 举报
本文主要介绍了库卡机器人外部自动运行模式的配置和操作过程,强调了如何通过外部自动运行接口与上级控制器(如PLC)进行交互,以控制机器人执行特定任务。配置过程中涉及的关键参数包括程序号类型、长度、奇偶位、有效性和外部启动、运行许可等输入/输出端口的设定。
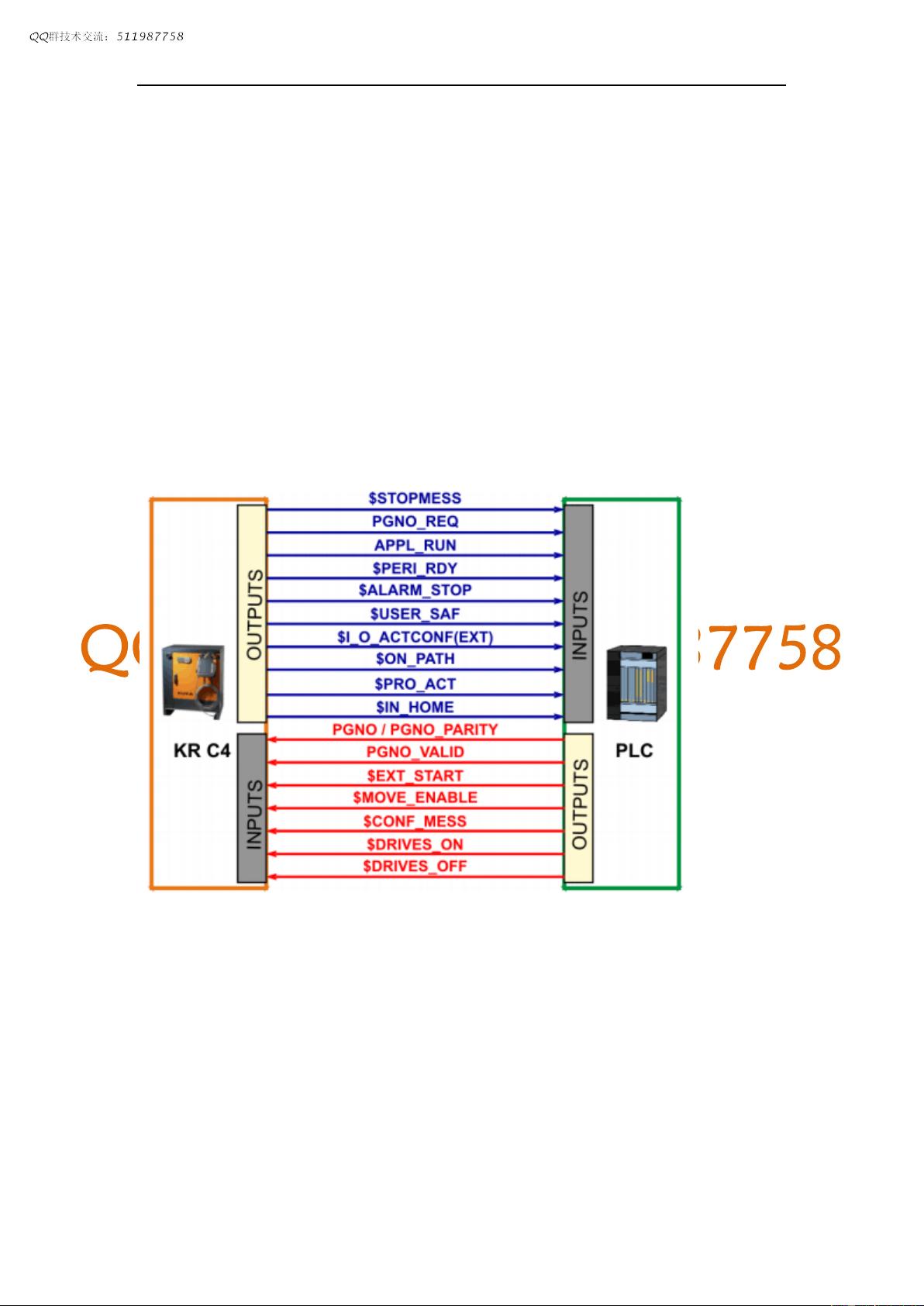
在库卡机器人系统中,外部自动运行模式允许上级控制器(例如PLC)来控制机器人的运动和进程。这个模式下,上级控制系统可以通过接口发送运行许可、故障确认、启动程序等信号,而机器人控制系统则反馈运行状态和故障信息。配置外部自动运行接口时,有以下几个重要的步骤和变量:
1. 配置CELL.SRC程序,这是机器人执行的主要程序,通常包含机器人的工作流程。
2. 配置外部自动运行接口的输入/输出端。这些端口包括:
- PGNO_TYPE: 定义了程序编号的格式,决定如何解析上级控制器传递的程序编号。
- PGNO_LENGTH: 指定程序编号的位宽,范围从1到16,如果PGNO_TYPE为2,则只接受4、8、12和16位的宽度。
- PGNO_PARITY: 用于接收上级控制器传递的程序号的奇偶校验位,当PGNO_TYPE为3时,此参数不被分析。
- PGNO_VALID: 确认程序号的有效性,上级控制器通过此端口发送读取程序号的指令。
- $EXT_START: 外部启动输入,当信号上升沿出现时,启动或继续程序(通常是CELL.SRC),但只分析脉冲上升沿。
- $MOVE_ENABLE: 允许运行,上级控制器通过这个端口检查机器人驱动器的状态,机器人在驱动装置被上级控制器停止后,需要清除“开通全部运行”信息并再次发送外部启动信号才能重新运行。
- $CONF_MESS: 确认信息提示,用于上级控制器确认故障信息已处理,仅分析信号的脉冲上升沿。
- $DRIVES_ON: 当此输入端收到至少20毫秒的高电平脉冲时,表示上级控制器已接通机器人驱动器。
外部自动运行模式下,机器人不会执行BCO(Block Continue Operation),即在启动后机器人将按照编程速度直接到达第一个位置,而不会在中间停止。此外,需要注意的是,如果$MOVE_ENABLE变量设计为$IN[1025],忘记配置其他输入端会导致无法进行外部启动。
总结来说,配置库卡机器人外部自动运行模式需要细心设置每个输入/输出端口,确保上级控制器和机器人之间的通信顺畅,从而实现对机器人运动的有效控制和监控。理解并正确应用这些参数对于实现自动化生产线上的精确机器人控制至关重要。
库卡外部自动运行模式的过程和配置
配置并采用外部自动运行
通过外部自动运行接口可用上级控制器 (例如用一个 PLC)来控制机器
人进程
上级控制系统通过外部自动运行接口向机器人控制系统发出机器人进程的
相关信号 (如运行许可、故障确认、程序启动等)。 机器人控制系统向上
级控制系统发送有关运行状态和故障状态的信息。
为了能够使用外部自动运行接口,必须进行下列配置:
1. 配置 CELL.SRC 程序。
2. 配置外部自动运行接口的输入 / 输出端
输入端 (从机器人控制器的角度)
PGNO_TYPE - 程序号类型
此变量确定了以何种格式来读取上级控制系统传送的程序编号。
如下表进行说明:
2017/8/1
下载后可阅读完整内容,剩余7页未读,立即下载
2023-07-02 上传
2023-06-05 上传
2023-05-13 上传
2023-02-17 上传
2023-05-13 上传
2023-07-11 上传
2023-06-30 上传

起个网名真难~
- 粉丝: 4919
- 资源: 17
 我的内容管理
展开
我的内容管理
展开







最新资源
- 解决Eclipse配置与导入Java工程常见问题
- 真空发生器:工作原理与抽吸性能分析
- 爱立信RBS6201开站流程详解
- 电脑开机声音解析:故障诊断指南
- JAVA实现贪吃蛇游戏
- 模糊神经网络实现与自学习能力探索
- PID型模糊神经网络控制器设计与学习算法
- 模糊神经网络在自适应PID控制器中的应用
- C++实现的学生成绩管理系统设计
- 802.1D STP 实现与优化:二层交换机中的生成树协议
- 解决Windows无法完成SD卡格式化的九种方法
- 软件测试方法:Beta与Alpha测试详解
- 软件测试周期详解:从需求分析到维护测试
- CMMI模型详解:软件企业能力提升的关键
- 移动Web开发框架选择:jQueryMobile、jQTouch、SenchaTouch对比
- Java程序设计试题与复习指南
