履带式搜救机器人驱动机构与关节设计
版权申诉
24 浏览量
更新于2024-06-23
收藏 1.3MB DOC 举报
"履带机器人驱动机构及关节机构设计说明书"
本设计说明书主要关注的是履带式搜救机器人的驱动机构及关节机构设计。在煤矿灾害救援的背景下,这种机器人旨在克服恶劣环境和复杂路况,替代或辅助人类进行危险的地下救援工作。履带机器人由于其强大的地面附着力和地形适应性,成为理想的移动平台。
本研究的核心在于设计一款结构新颖、创新且具有抗冲击能力的履带移动机器人。机器人采用模块化设计,便于维护和更换,可以根据不同任务需求加载相应的功能模块。其驱动方案选择了履带式结构,主要由四个关键部分构成:
1. 主动轮减速驱动机构:这是机器人动力来源的关键,它通过减速器将动力传递给履带,确保机器人能够在各种条件下稳定行走。
2. 翼板转动机构:两侧的翼板能够转动,帮助机器人调整姿态,增强越障和爬坡的能力,同时也提高了跨过沟壑的灵活性。
3. 自适应路面执行机构:这部分设计允许机器人根据地形的变化进行自我调整,以适应不平整或松软的地面,提高行驶稳定性。
4. 履带及履带轮运动机构:选用耐用的履带材料和设计,配合履带轮,以提供足够的牵引力和耐久性,应对恶劣的工作环境。
在设计过程中,不仅进行了理论论证和结构设计计算,还利用3D建模技术进行了可视化设计,以确保机器人的实体形态符合预期。此外,通过构建搜救机器人的虚拟样机,可以模拟其在各种条件下的运动性能,以便进行性能测试和优化。
关键词:搜救机器人、复合移动机构、模块化设计、主动轮驱动、翼板机构、自适应路面、履带机构、3D建模、虚拟样机。这些关键词涵盖了设计的主要内容和技术特点,展示了从理论到实践的全面考虑,旨在打造一个高效、灵活且可靠的煤矿灾害救援工具。

也常常是影响救护队员及时下井救护的一个主要因素。为了在高瓦斯下安全工作,搜救
机器人需要进行矿用隔爆兼本安型设计;元件在井下温度变化范围内应能可靠地工作;
为了防止煤尘和积水进入车体内部和运动副,厢体要进行密封、防水设计。
光照与烟雾井下无自然光,机器人只有自带光源。事故后,往往烟雾充斥巷道和工
作面,能见度低,对照明产生一定影响。
能源使用井下专用蓄电池供电。
因此,井下的特殊环境要求所设计的搜救机器人形体较小,载荷较大,运动灵活,
具有通过狭小空间、碎煤和岩石区的能力,能够实现较大弧度的转动,较强的越障、爬
坡能力,以及防爆、防水、耐高温、视觉防尘等功能。
3.2 典型移动机构方案论证分析
便携式机器人按移动方式分主要有轮式、履带式、腿足式三种,另外还有步进移动
式、蠕动式、混合移动式、蛇行移动式等。
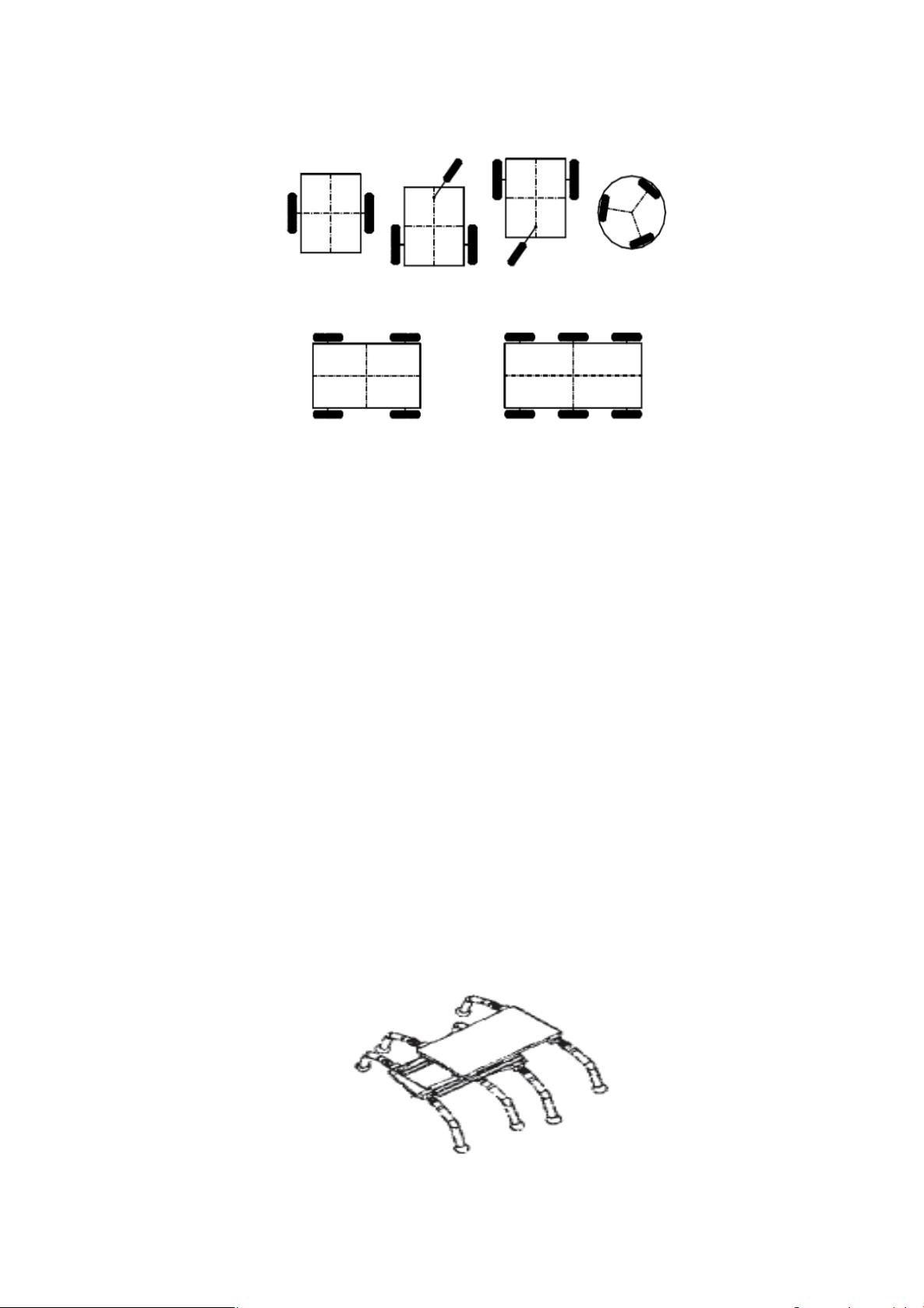
3.2.1 轮式移动机构特点
轮式移动机构在救灾机器人中是最为普通的运动方式,轮式机器人移动机构普遍具
有结构简单、运动速度快、能源利用率高的、机动性好强的特点,同时具有自重轻、不
损坏路面、作业循环时间短和工作效率高等优势。控制的角度看,编程简单并有较高的
可靠性,每个轮子都可以独立驱动。与履带式移动机器人相比,当跨越不平坦地形时,
轮式机器人有着固有的不足,限制了其运动能力,其稳定性和对环境的适应性完全依赖
于环境本身的状况,对于进入复杂的环境完成既定任务存在严重的困难。轮式移动机构
按轮的数量可分为 2 轮、3 轮、4 轮、6 轮、8 轮。该结构存在着一定的局限性,只能在
相对平坦、表面较硬的路面上行驶,如遇到软性地面(如沼泽、草地、雪地、沙地等)容
易打滑、沉陷,但可根据具体地面环境采用一些预防措施来缓解该类情况的出现,如采
用不同种类的款式轮胎以提高其越野能力,象沙漠车辆、山地车辆等,其各种结构如图
2-1 所示。
剩余45页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-07-14 上传
2021-11-18 上传
2023-07-11 上传
2023-07-15 上传
2023-07-13 上传
2022-05-31 上传

omyligaga
- 粉丝: 87
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
