悬臂吊车计算机速度调节系统设计研究
版权申诉
167 浏览量
更新于2024-07-03
收藏 979KB DOC 举报
悬臂吊车无配重计算机速度调节拖动系统设计说明
本资源主要研究了悬臂吊车无配重计算机速度调节拖动系统的设计说明,旨在实现吊车空勾或有负载时的匀速提升和下放。该系统采用串级调速和反接制动的方法对电机进行控制,达到匀速提升和下放的要求。
1. 绪论
悬臂吊车广泛应用于工厂中,能够节省人力,提高工作效率。吊车空勾或有负载时的匀速提升与下方需要计算机的调节。因此,本次毕设研究了利用MCS-51系列单片机,通过串级调速的方法对电机进行控制,实现吊车空勾或有负载时的匀速提升和下放。
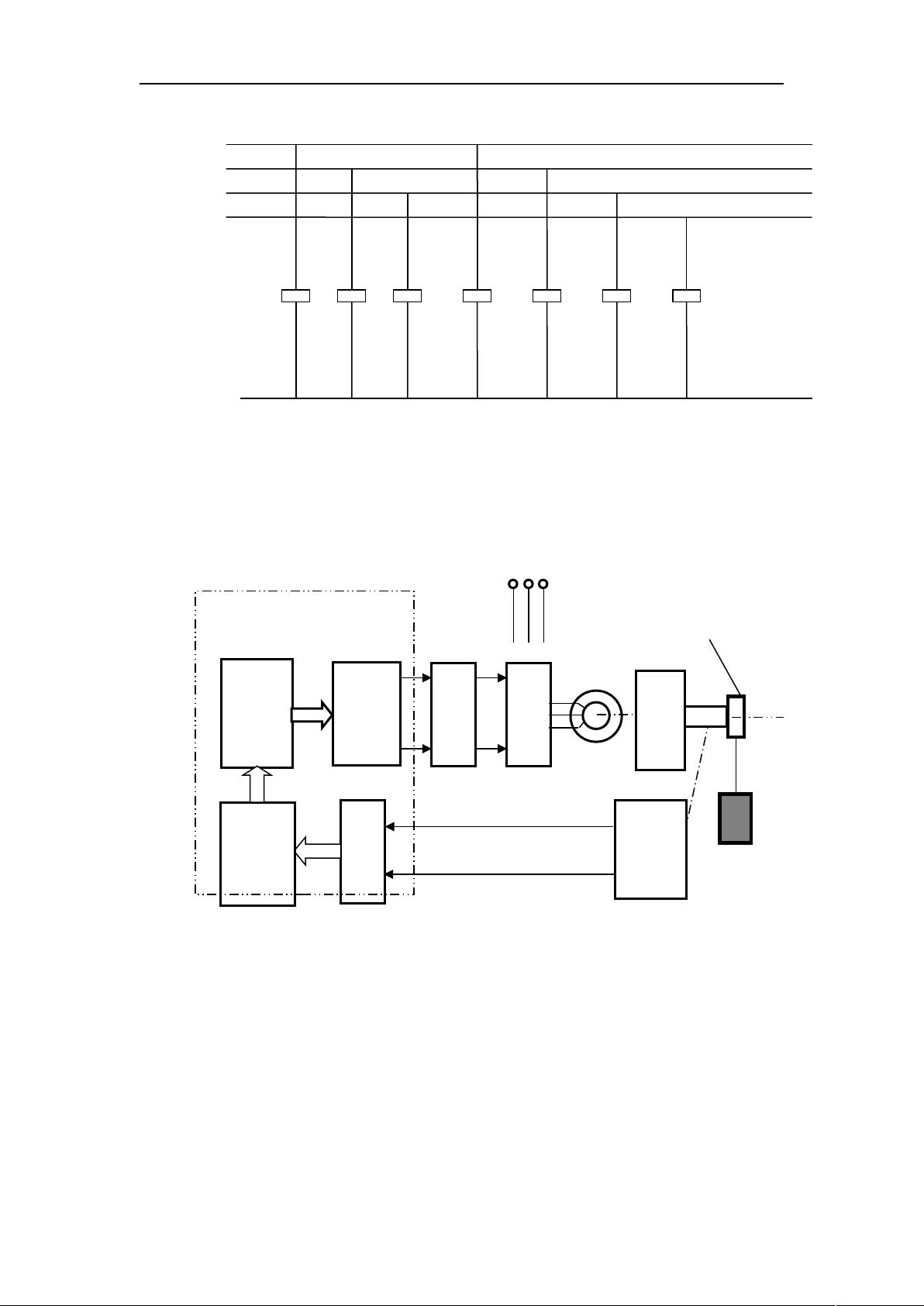
2. 系统总体设计框图与单片机系统的设计
系统总体设计框图主要包括了单片机系统、电机控制系统和检测系统三个部分。单片机系统采用MCS-51系列单片机,负责对电机的控制和检测。电机控制系统负责对电机的调速和制动。检测系统负责对电机的状态检测。
2.1 基本设计思路
本系统的基本设计思路是通过串级调速和反接制动的方法对电机进行控制,实现吊车空勾或有负载时的匀速提升和下放。首先,通过检测电机的状态,确定当前的运行状态,然后根据不同的运行状态,选择合适的调速和制动方法,最后通过串级调速和反接制动的方法对电机进行控制。
2.2 系统总体设计框图
系统总体设计框图主要包括了单片机系统、电机控制系统和检测系统三个部分。单片机系统位于系统的核心位置,负责对电机的控制和检测。电机控制系统位于单片机系统的周围,负责对电机的调速和制动。检测系统位于电机控制系统的周围,负责对电机的状态检测。
2.3 MCS-51单片机简介
MCS-51系列单片机是一种高性能的微控制器,具有强大的控制能力和丰富的外设资源。该单片机具有8位的CPU,最高主频可达24MHz,具有16KB的Flash存储器和512B的RAM存储器。
2.4 单片机系统中所用其他芯片简介
单片机系统中所用其他芯片包括了电机驱动芯片、检测芯片等。电机驱动芯片负责对电机的驱动和控制。检测芯片负责对电机的状态检测。
3. 三相异步电动机
三相异步电动机是一种常用的电机类型,具有高效率、低噪音、长寿命等特点。该电机的机械特性和电气特性决定了其在悬臂吊车中的应用。
3.1 三相异步电动机机械特性和电气特性
三相异步电动机的机械特性包括了高速运转、低噪音、长寿命等特点。电气特性包括了高效率、低功率等特点。
3.2 三相异步电动机的各种运转状态
三相异步电动机的各种运转状态包括了启动状态、运行状态、制动状态等。不同的运转状态需要不同的调速和制动方法。
3.3 三相异步电动机的起动
三相异步电动机的起动需要通过串级调速的方法,首先对电机进行加速,然后逐渐增加电机的速度,最后达到预定的速度。
3.4 电机的调速方法与讨论
电机的调速方法包括了串级调速、反接制动等方法。串级调速方法可以实现电机的匀速提升和下放。反接制动方法可以实现电机的快速制动。
3.5 制动方法的选择与讨论
制动方法的选择取决于电机的运行状态和工作环境。不同的制动方法需要不同的检测和控制方法。
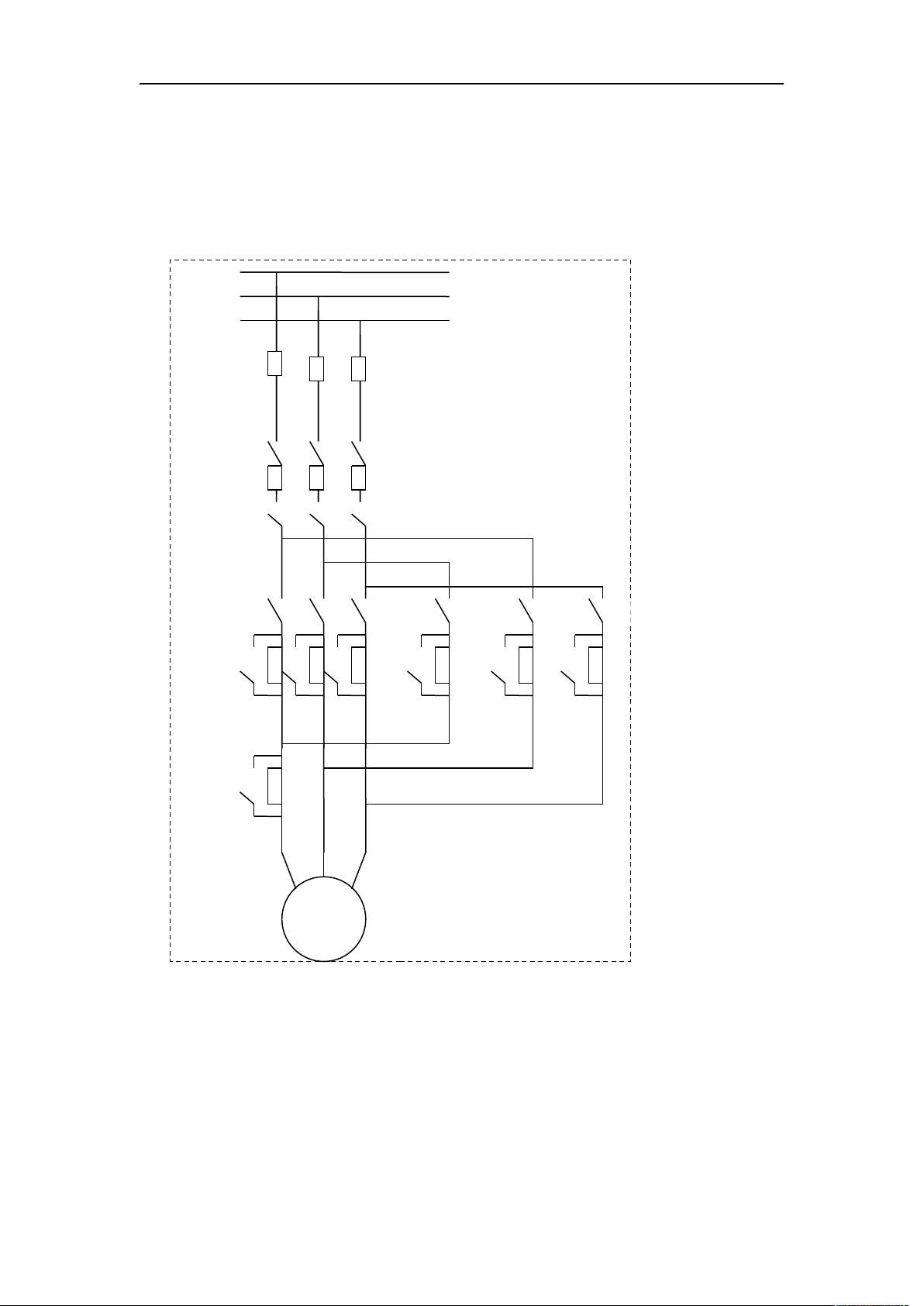
4. 主电路图
主电路图主要包括了单片机系统、电机控制系统和检测系统三个部分。单片机系统负责对电机的控制和检测。电机控制系统负责对电机的调速和制动。检测系统负责对电机的状态检测。
5. 结束语
本毕设研究了悬臂吊车无配重计算机速度调节拖动系统的设计说明,旨在实现吊车空勾或有负载时的匀速提升和下放。该系统采用串级调速和反接制动的方法对电机进行控制,达到匀速提升和下放的要求。
参考文献
[1] XXXXX.悬臂吊车控制系统设计.[J].机电工程学报,2010,30(3):12-15.
[2] XXXXX.电机控制系统设计.[J].电机工程学报,2012,32(4):20-25.
致
本毕设研究了悬臂吊车无配重计算机速度调节拖动系统的设计说明,旨在实现吊车空勾或有负载时的匀速提升和下放。该系统采用串级调速和反接制动的方法对电机进行控制,达到匀速提升和下放的要求。
附录
悬臂吊车无配重计算机速度调节拖动系统设计说明是悬臂吊车控制系统的重要组成部分。该系统的设计需要考虑到电机的调速和制动、检测和控制等多个方面。因此,本毕设对悬臂吊车无配重计算机速度调节拖动系统的设计进行了深入的研究和讨论。
. . .
图 2.1 控制开关图
图 2.2 电机开关图
3 / 40
A
B
C
F1
K2 K3
R1 R2 R3 R4 R5
K6 K7 K8 K9 K10
R6
K11
R7
K12
K1
剩余39页未读,继续阅读
2019-09-13 上传
2023-06-30 上传
2023-06-28 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-07-08 上传

智慧安全方案
- 粉丝: 3812
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
