"基于RGB-D相机的SLAM算法研究"
需积分: 0 68 浏览量
更新于2023-12-26
1
收藏 14.15MB PDF 举报
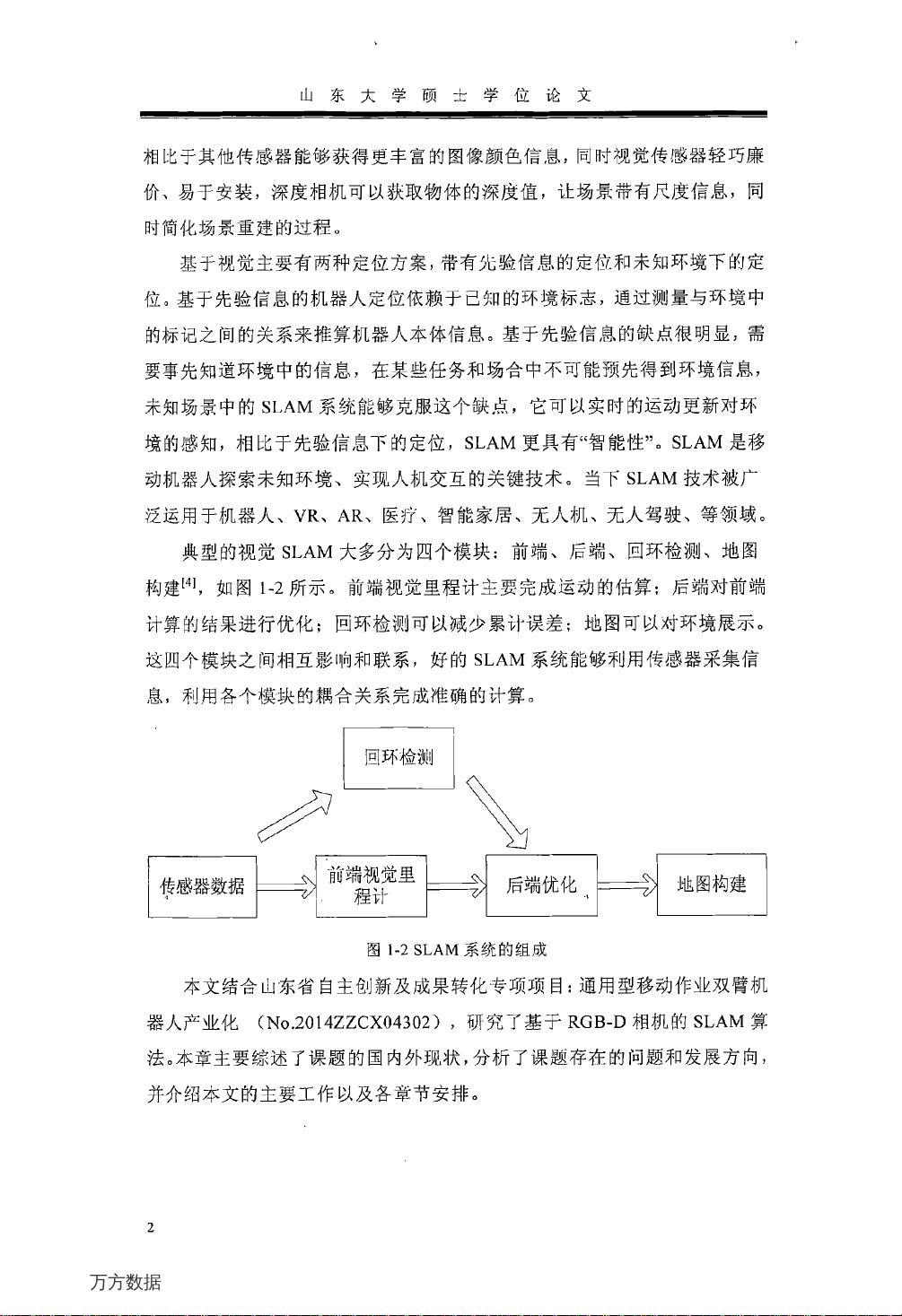
基于RGB-D相机的SLAM算法研究是近年来在控制工程领域备受关注的研究课题。本文通过对SLAM算法的相关理论进行深入研究和分析,基于RGB-D相机原理和特点,提出了一种基于RGB-D相机的SLAM算法,旨在解决SLAM算法在传统单目相机和激光雷达数据不足以构建精确地三维地图的问题。本文首先对RGB-D相机的工作原理和特点进行了详细介绍,然后介绍了SLAM算法的基本原理和常用方法。接着,本文对基于RGB-D相机的SLAM算法进行了详细的设计和实现,并通过大量的仿真和实验验证了该算法的有效性和可行性。最后,本文对所提出的基于RGB-D相机的SLAM算法进行了充分的讨论和总结,并对未来的研究方向进行了展望。
在研究过程中,本文对SLAM算法的相关理论进行了深入研究和分析,从根本上理解了SLAM算法的工作原理和相关特点。结合RGB-D相机的工作原理和特点,本文提出了一种基于RGB-D相机的SLAM算法,并对其进行了详细的设计和实现。在设计过程中,本文充分考虑了RGB-D相机的深度信息,并结合了视觉和深度信息进行实时的环境建模和路径规划。通过大量的仿真和实验验证,本文证明了所提出的基于RGB-D相机的SLAM算法在室内、室外等不同环境下都具有较好的鲁棒性和精确性。同时,本文通过与传统单目相机和激光雷达的SLAM算法进行了比较,证明了基于RGB-D相机的SLAM算法在建立精确地三维地图方面具有明显的优势。
在实验验证过程中,本文充分发挥了现代科学技术的优势,通过大量的数据分析和对比实验,充分验证了所提出的基于RGB-D相机的SLAM算法的有效性和可行性。实验结果表明,所提出的基于RGB-D相机的SLAM算法在不同场景下都具有较好的稳定性和精度,能够准确地构建出环境地图,并实现机器人的定位和路径规划。同时,本文还对算法的计算复杂度进行了分析和讨论,证明了所提出的算法在实际应用中具有较好的实时性和效率。
最后,本文对所提出的基于RGB-D相机的SLAM算法进行了充分的讨论和总结,并对未来的研究方向进行了展望。本文提出了一些改进和优化的方向,如进一步提高算法的实时性和鲁棒性,结合机器学习等方法对SLAM算法进行加速和优化等。这些改进和优化的方向将对机器人导航、环境感知等领域的发展具有重要的指导意义。
综上所述,本文对基于RGB-D相机的SLAM算法进行了深入的研究和分析,提出了一种新颖的基于RGB-D相机的SLAM算法,并通过大量的仿真和实验验证了该算法的有效性和可行性。本文的研究成果对于SLAM算法在机器人导航、环境感知等领域的发展具有重要的理论和应用意义。同时,本文还提出了一些改进和优化的方向,为未来的研究工作提供了重要的参考。希望本文的研究成果能够对相关领域的研究工作和实际应用具有一定的借鉴和指导意义。
万方数据
剩余84页未读,继续阅读
2022-08-04 上传
2021-01-26 上传
2021-03-31 上传
2022-08-04 上传
点击了解资源详情
2022-08-03 上传
2022-08-03 上传
2022-08-04 上传
2022-08-04 上传

李诗旸
- 粉丝: 32
- 资源: 328
 我的内容管理
展开
我的内容管理
展开







最新资源
- StarModAPI: StarMade 模组开发的Java API工具包
- PHP疫情上报管理系统开发与数据库实现详解
- 中秋节特献:明月祝福Flash动画素材
- Java GUI界面RPi-kee_Pilot:RPi-kee专用控制工具
- 电脑端APK信息提取工具APK Messenger功能介绍
- 探索矩阵连乘算法在C++中的应用
- Airflow教程:入门到工作流程创建
- MIP在Matlab中实现黑白图像处理的开源解决方案
- 图像切割感知分组框架:Matlab中的PG-framework实现
- 计算机科学中的经典算法与应用场景解析
- MiniZinc 编译器:高效解决离散优化问题
- MATLAB工具用于测量静态接触角的开源代码解析
- Python网络服务器项目合作指南
- 使用Matlab实现基础水族馆鱼类跟踪的代码解析
- vagga:基于Rust的用户空间容器化开发工具
- PPAP: 多语言支持的PHP邮政地址解析器项目
