Verilog实现的交通灯控制器设计与解析
版权申诉
"这篇文档是关于基于Verilog的交通灯控制器设计的研究,主要涉及交通灯控制器的系统设计、组成、Verilog代码实现以及仿真验证。该设计由武汉科技大学的冯玉林老师指导,针对自动化0703班的学生进行。项目要求设计一个十字路口的交通信号灯控制电路,具备红绿灯定时控制、倒计时显示、车道切换提示等功能,并能灵活调整运行时间。设计中还考虑了左转灯的控制,通过Verilog语言进行硬件描述,并使用Muxplus工具进行仿真验证。"
交通灯控制器的设计是一项关键任务,它涉及到道路安全和交通流畅。在这个项目中,设计内容主要包括以下几个方面:
1. **定时控制电路**:设计要求红绿灯按照预设的规律交替亮灭,红灯表示禁止通行,绿灯表示允许通行。主干道通行时间为99秒,支干道为30秒。在转换车道之前,对应方向的绿灯会闪烁5秒作为警示。
2. **倒计时显示**:在亮灯期间,需要显示剩余的运行时间,这通常通过数码管来实现,便于驾驶员了解通行时间。
3. **车道切换逻辑**:在车道转换时,如主干道至支干道或反之,会在即将转换的5秒内,当前车道的绿灯闪烁,而目标车道保持红灯,以确保已经过停车线的车辆可以继续行驶,而未过线的车辆需停止。
4. **时间设置的灵活性**:设计应允许对红绿灯的运行时间进行重新配置,以适应不同交通流量或特殊需求。
5. **左转灯控制**:除了直行信号外,还需要考虑左转车辆的需求,观察实际交通情况并实现相应的控制逻辑。
6. **Verilog语言描述**:使用硬件描述语言Verilog来编写控制电路的代码,这是一种广泛应用于数字集成电路设计的语言。
7. **仿真验证**:通过Muxplus工具对设计进行仿真,检查其功能是否符合预期,确保设计的正确性。
8. **硬件实现**:设计完成后,需要将Verilog代码下载到实验板上进行实际调试,以验证其在真实环境中的性能。
交通灯控制系统的组成框图展示了系统的主要组件,包括主干道和支干道的绿灯、左转灯、红灯,以及控制这些信号的逻辑单元。ASM图(状态机图)用于描述控制电路的工作流程,帮助理解各个状态之间的转换条件和触发机制。
在设计中,交通灯控制器的关键在于状态机的设计,例如状态SO和S1。SO状态代表主干道绿灯亮,支干道红灯亮,当满足特定条件(如主干道绿灯亮足规定时间且有左转需求)时,系统会进入S1状态,此时主干道左转灯亮,支干道仍为红灯,直到左转灯闪烁并转换至下一个状态S2。
总体而言,这个基于Verilog的交通灯控制器设计项目旨在提供一种高效、安全的交通管理方案,通过数字逻辑实现自动化控制,同时考虑了实际情况的复杂性和灵活性。
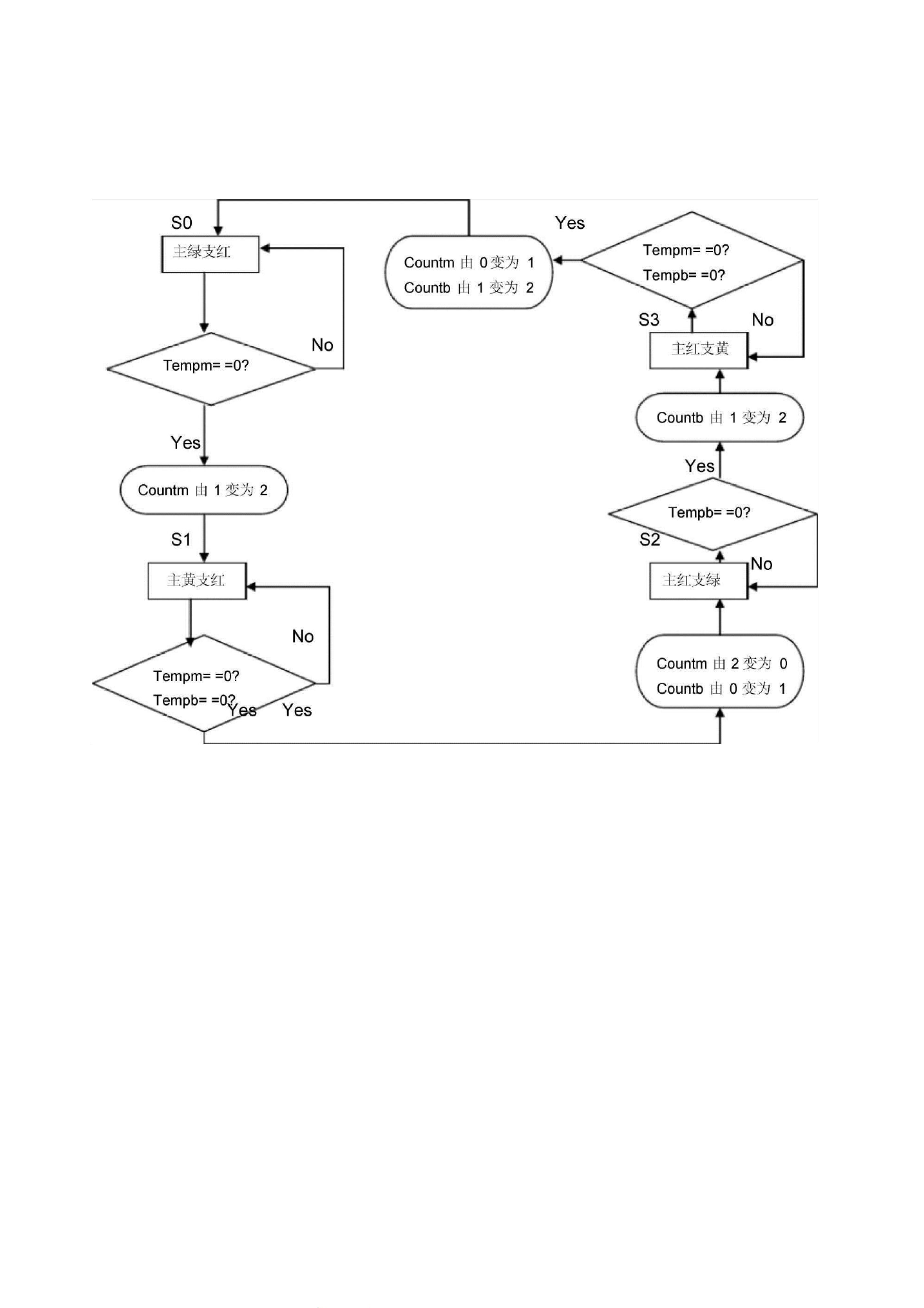
三、交通灯控制电路的设计
交通灯控制器设计的重点是控制电路的设计,
的算法可用下图所示的 ASM 图描述。
根据设计要求分析,控制电路
各状态的详细说明如下:
SO 状态:主干道绿灯亮,支干道红灯亮,此时若主干道有车等待左拐,而且主 干道绿灯已
亮足规定的时间间隔 Ts;在主干道绿灯亮了(Ts-5)s 后,则开始闪亮, 直至绿灯亮了
Ts;控制器发出状态转换信号 Tempm==0,输出从状态 S0 转换到
S1。
S1 状态:主干道左拐灯亮,支干道红灯亮,此时若支干道有车等待通过,而且 主干道左拐
灯已亮足规定的时间间隔 Ts;在主干道左拐灯亮了(Ts-5)s 后,则开
始闪亮,直至左拐灯亮了 Ts;控制器发出状态转换信号 Tempm==0 和 Tempb==0, 输出从
状态 S1 转换到 S2。
S2 状态:支干道绿灯亮,主干道红灯亮,若此时支干道继续有车,则继续保持 此状态,但
支干道绿灯亮的时间不得超过 Ts 时间间隔;在主干道绿灯亮了(Ts-5)s 后,则开始闪
亮,直至绿灯亮了 Ts;控制器发出状态转换信号 Tempb==0,使 输出转换到 S3 状态。
S3 状态:支干道左拐灯亮,主干道红灯亮,此时若主干道有车等待通过,而且
剩余19页未读,继续阅读
2022-06-19 上传
2022-06-21 上传
2022-06-19 上传
2022-06-20 上传
2022-06-20 上传
2022-06-19 上传
2022-06-29 上传
2021-07-13 上传
2021-07-13 上传









