三菱CR750-D/C751-D控制器安全操作与维护指南
需积分: 50 184 浏览量
更新于2024-07-17
3
收藏 4.04MB PDF 举报
"该资源是关于三菱机器人CR750-D、CR751-D以及CR760-D控制器的使用说明书,涵盖了从安装、基本操作到维护的全面指南。"
在工业自动化领域,三菱机器人因其可靠性和高效性能而广受欢迎。CR750-D、CR751-D和CR760-D是三菱推出的工业机器人控制器,它们用于驱动和控制机器人的运动和功能。这份使用说明书旨在确保用户能够安全、正确地操作和维护这些控制器。
在安全方面,手册强调了以下几个关键点:
1. 专业人员操作:所有示教作业和未切断动力源的维护工作都应由受过专业培训的人员执行,以防止意外伤害。
2. 作业规程:制定并遵循详细的机器人操作规程,包括异常情况和重启的处理流程,确保操作安全有序。
3. 紧急停止装置:在示教和运行过程中,需设置紧急停止开关,以便在紧急情况下迅速中断机器人的运行。
4. 标识提示:在进行示教作业时,应放置“示教作业中”的标识,提醒周围人员注意安全。同样,进行维护时,应用“维护作业中”的标牌警示他人。
5. 安全围栏:为了防止作业人员与机器人接触,需设置安全栅栏或围栏,以隔离运行中的机器人。
6. 运行开始信号:确立并执行固定的操作开始信号,确保所有相关人员都清楚何时可以开始机器人运行。
7. 维护点检:在开始作业前,应进行详细的点检,确保机器人、紧急停止开关和其他相关设备没有异常。
此外,手册还提出了其他安全注意事项,如:
- 遵循“安全手册”:使用机器人前,用户必须熟悉“安全手册”中的所有指导,以了解更多的安全措施和预防措施。
- 控制设备互锁:在使用多个控制设备进行自动运行时,用户需要设计操作权的互锁,以避免误操作。
- 使用环境:机器人应在规定的环境条件下使用,超出规格可能影响其性能和可靠性。
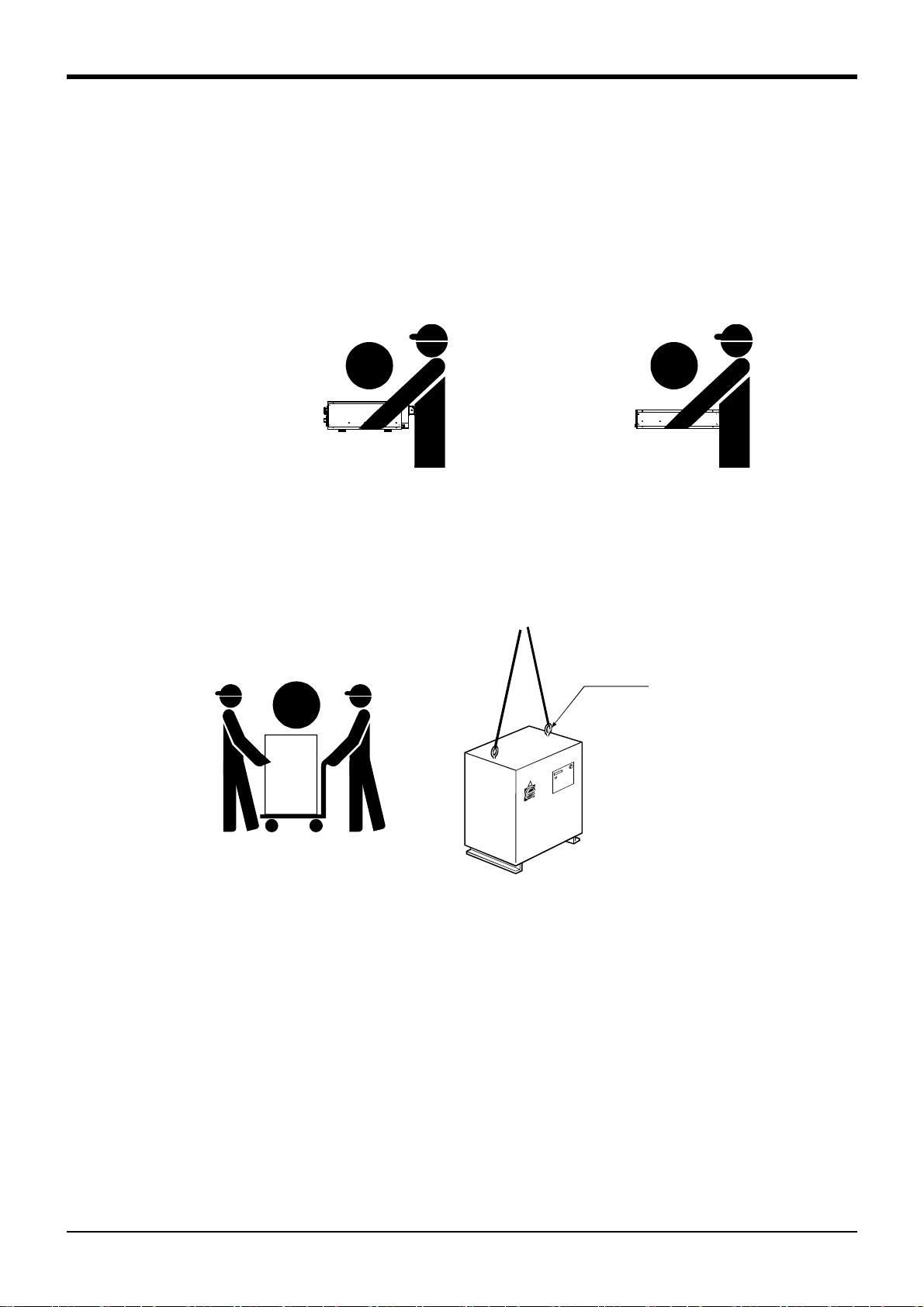
- 搬运机器人:必须按照制造商指定的方式搬运机器人,避免不当搬运导致的损坏或事故。
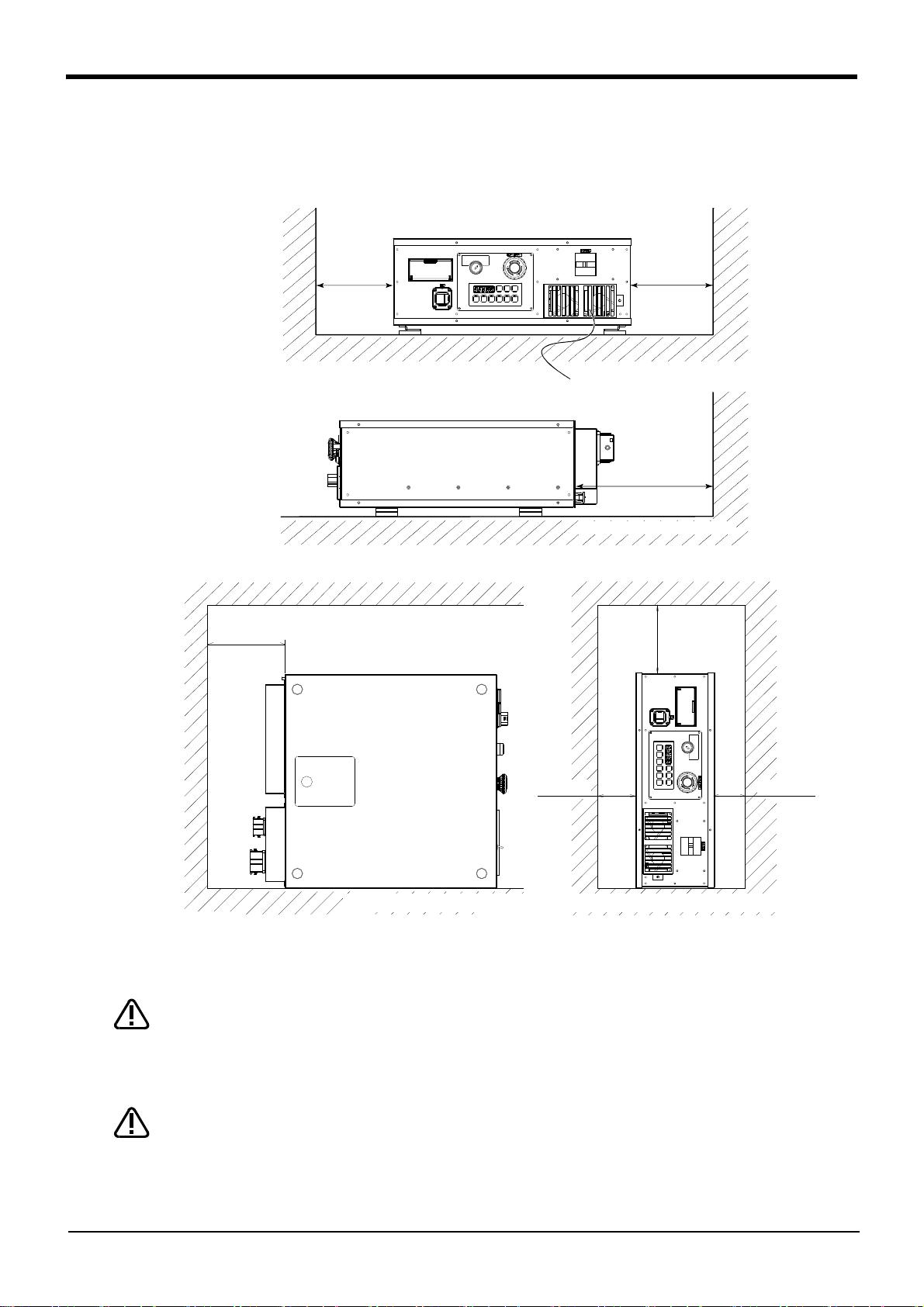
- 安装稳固:确保机器人安装在坚固的基座上,防止因不稳定造成的位置偏差或振动。
- 电缆管理:电缆应远离噪声源,防止干扰,同时避免对连接器施加过大压力或过度弯曲电缆,以免造成故障。
- 负载限制:机器人及其抓手承载的工件重量不应超过其额定负载和允许扭矩,超载可能导致故障或安全事故。
这份使用说明书不仅提供了详细的操作指南,也是保障工业安全的重要参考资料,对于操作和维护三菱CR750-D、CR751-D和CR760-D控制器的用户来说,是一份不可或缺的工具。
1-5
安全注意事项
1 使用之前
将机器人的机械臂从外部用手使其活动的情况下不要将手或手指放入开口部位。
有些姿势可能会导致手或手指夹伤。
不要通过将机器人控制器的主电源置为 OFF 进行机器人的停止或紧急停止。
在自动运行过程中机器人控制器的主电源被置为 OFF 的情况下,将可能会对机器人的精
度带来不利影响。
此外,由于机械臂的掉落或惯性有可能导致与外围装置等相互干涉。
对程序或参数等机器人控制器的内部信息进行改写时不要将机器人控制器的主电源置为
OFF。
如果在自动运行中或程序 · 参数的写入过程中机器人控制器的主电源变为 OFF,机器人
控制器的内部信息有可能被破坏。
使用本产品的 GOT 直接连接功能的情况下,不要连接便携式 GOT。无论操作权有效 / 无
效,便携式 GOT 都可以使机器人自动运行,可能导致设备损坏或人身事故。
接通了机器人控制器的电源时,不要拆下 SSCNET III 电缆。不要直视 SSCNET III 连接
器及 SSCNET III 电缆前端发出的强光。
强光入目有可能导致眼睛不适。
(SSCNET III 的光源相当于 JISC6802、IEC60825-1 规定的等级 1。)
将 SSCNET III 电缆拆下后,如果未在 SSCNET III 连接器上安装盖子,有可能会黏附垃
圾或灰尘而导致特性劣化或误动作。
应注意不要出现配线错误。进行了不符合规格的连接的情况下,有可能导致紧急停止无
法解除等的误动作。
为了防止误动作,配线完毕后,必须对机器人控制器操作面板、示教单元紧急停
止、用户紧急停止、门开关等的各种功能是否正常动作进行确认。
将控制器的 USB 与市面销售的设备 ( 笔记本电脑、计算机、LAN 用集线器等 ) 连接使用
时,有可能与本公司设备的匹配性及温度 • 噪声等的 FA 环境不符合。
使用时,有时需要采取 EMI 对策 (Electro-Magnetic Interference) 或添加铁氧体磁芯
等其它对策,用户应进行充分的动作确认。
此外,对于与市面销售设备连接时的动作保障 • 维护等本公司将不予承担。
警告
注意
注意
危险
危险
危险
注意
注意
剩余119页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-09-15 上传
1545 浏览量
529 浏览量
382 浏览量
2024-03-15 上传
710 浏览量

weixin_41698745
- 粉丝: 6
- 资源: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB在图像处理技术方面的应用论文
- 回溯算法 用来设计货箱装船、背包、最大完备子图、旅行商和电路板排列问题的求解算法。
- 有关贪婪算法的一篇文章
- 2410-S实验指导书.pdf
- makefile PDF 经典电子书
- 嵌入式CC++语言精华文章集锦
- visual studio .NET 技术手册
- 测试用例设计指南说明
- 正交试验设计测试用例
- 中软终端安全解决方案
- Python Essential Reference (3rd Edition)
- The Art of Unix Programming
- Linux内核完全注释-3.0
- 自考英语2的复习知识重点难点
- 全国计算机等级考试三级C语言上机100题
- 蓝屏代码 蓝屏代码 详解
