InvenSense MPU6050: 6轴传感器模块详解与IIC通信设置
需积分: 0 43 浏览量
更新于2024-08-04
收藏 720KB DOCX 举报
MPU6050陀螺仪是一款由InvenSense公司出品的经济型6轴传感器模块,它集成了三轴加速度计和三轴角速度计,具有高度集成、体积小巧的特点,被广泛应用于各种需要精确姿态感知的设备,如平衡车、无人机、飞行鼠等。该模块通过I2C通信接口提供XYZ轴的角速度和加速度数据,以及温度信息。
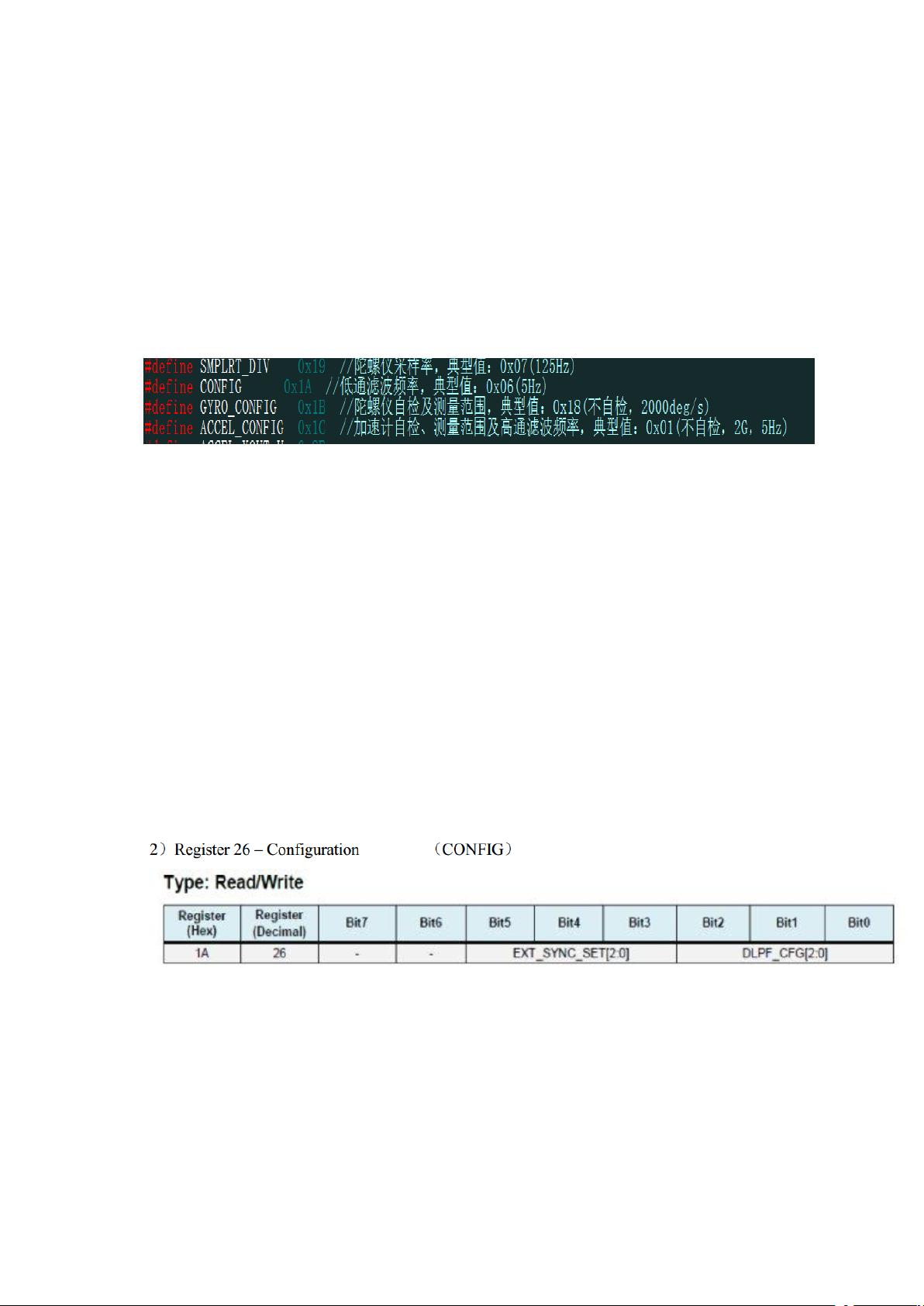
使用MPU6050前,需要确保它已经完成了内部初始化过程,因为它是带有微控制器功能的器件,内部有自己的处理程序。初始化过程中,我们需要通过写入特定寄存器来配置传感器的工作参数。例如,头文件MPU6050.h提供了这些设定选项。
传感器的核心功能之一是利用三个16位ADC将陀螺仪和加速度计的模拟信号转换为数字信号。陀螺仪的测量范围可调,支持±250°/s、±500°/s、±1000°/s和±2000°/s等多种精度级别,加速度计则有±2g、±4g、±8g和±16g的可选范围。采样频率可通过SMPLRT_DIV寄存器进行设置,这个值决定了传感器采集数据的速度,非零值会导致采样频率降低,从而实现低通数字滤波。
配置寄存器如CONFIG8和EXT_SYNC_SET3,允许用户调整帧同步和数字低通滤波器的行为。FSYNC引脚用于捕捉外部信号的变化,而根据EXT_SYNC_SET的设置,可以选择是否使用外部帧同步。低通滤波器的选择会影响数据输出的实时性和精度。
在实际应用中,初始化函数示例代码如Single_Write_IIC(SLAVEADRESS, CONFIG, 0x06)中,0x06=00000110意味着EXT_SYNC_SET被设置为0,不采用外部帧同步,并且低通滤波器设置为二进制值6,对应于DLPF_CFG的6种模式之一。
对于加速度计的采样,虽然这部分内容在提供的部分缺失,但通常也会涉及类似的设置和配置,以确保加速度计数据的准确性和稳定性。
MPU6050陀螺仪的使用涉及到硬件连接、寄存器配置、数据采样率调整以及可能的外部信号同步等多个关键步骤,理解并掌握这些设置至关重要,它们直接影响到最终系统的性能和精度。在开发基于MPU6050的应用时,开发者需充分理解这些技术细节,以实现高效和精准的传感器数据采集。
MPU6050 模块是 InvenSense 公司推出的一款低成本的 6 轴传感器模块,包括三
轴加速度,三轴角速度。其体积小巧,用途非常广。做平衡小车,四轴飞行器,
飞行鼠标等等,都是必不可少而且是最优的传感器解决方案。
我们可以通过 IIC 通讯从 MPU6050 的 XYZ 三个轴的角速度分量和加速度分量还
有温度。
MPU6050 在上电以后需要等待一段时间,因为 6050 其实也是一块 MCU(单片
机),里面有自己的处理程序,延时一段时间等待其内部初始化成功,再进行其
他的操作。接下来就是初始化一些 6050 的设定,当然这些设定是通过写寄存器
来 设 置 的 。
可以在 MPU6050.h 头文件中找到这些设定。
MPU60x0 对陀螺仪和加速度计分别采用了三个 16 位的 ADC 将其测量的模拟量转
化为可输出的数字量。为了精确跟踪快速和慢速的运动,传感器的测量范围都
是 用 户 可 控 的 , 陀 螺 仪 可 测 范 围 为 ±250 , ±500 , ±1000 , ±2000°/s
(dps).加速度计可测范围±2,±4,±8,±16g。
SMPLRT_DIV 8 位无符号值,通过该值将陀螺仪输出分频,得到采样频率(采样
频率,也称为采样速度或者采样率,定义了每秒从连续信号中提取并组成离散
信号的采样个数,它用赫兹(Hz)来表示)。采样率的计算公式:
采样率=陀螺仪的输出率/(1+ SMPLRT_DIV)
当低通数字滤波不开启的时候,陀螺仪的输出率为 8Khz(DLPF_CFG=0 or 7),
当低通数字滤波开启的时候,陀螺仪的输出频率为 1Khz。
CONFIG 8 位无符号值,同时设置 EXT_SYNC_SET 3 位无符号值,配置帧同步引
脚的采样,DLPF_CFG 3 位无符号值,配置数字低通滤波器。位分配如下表:
通过配置 EXT_SYNC_SET,可以对连接到 FSYNC 引脚的一个外部信号进行采样。
FSYNC 引脚上的信号变化会被锁存,这样就能捕获到很短的频闪信号。
采样结束后,锁存器将复位到当前的 FSYNC 信号状态。
根据下面的表格定义的值,采集到的数据会替换掉数据寄存器中上次接收到的
有效数据。配置表格如下:
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2018-10-14 上传
2014-05-08 上传
2021-05-29 上传
2022-09-24 上传
2024-07-18 上传

东方捕
- 粉丝: 22
- 资源: 310
 我的内容管理
展开
我的内容管理
展开







最新资源
- 正整数数组验证库:确保值符合正整数规则
- 系统移植工具集:镜像、工具链及其他必备软件包
- 掌握JavaScript加密技术:客户端加密核心要点
- AWS环境下Java应用的构建与优化指南
- Grav插件动态调整上传图像大小提高性能
- InversifyJS示例应用:演示OOP与依赖注入
- Laravel与Workerman构建PHP WebSocket即时通讯解决方案
- 前端开发利器:SPRjs快速粘合JavaScript文件脚本
- Windows平台RNNoise演示及编译方法说明
- GitHub Action实现站点自动化部署到网格环境
- Delphi实现磁盘容量检测与柱状图展示
- 亲测可用的简易微信抽奖小程序源码分享
- 如何利用JD抢单助手提升秒杀成功率
- 快速部署WordPress:使用Docker和generator-docker-wordpress
- 探索多功能计算器:日志记录与数据转换能力
- WearableSensing: 使用Java连接Zephyr Bioharness数据到服务器
