直流位置随动系统分析与设计:MATLAB仿真与校正
"本文详细探讨了位置随动系统的分析与设计,包括时域分析、频域分析、串联校正以及模拟电路的设计与验证。作者通过MATLAB软件进行了系统的稳定性分析,并利用THBCC-2软件进行了实际电路的验证,旨在提高系统的控制精度和动态性能。"
在位置随动系统的分析中,首先考虑的是系统的动态性能指标。通过对阶跃信号和斜坡信号的响应分析,可以评估系统的瞬态行为和稳态特性。动态性能指标通常包括上升时间、超调量、调节时间以及稳态误差。这些参数对于评价系统跟踪给定输入的能力至关重要。在描述中提到,通过计算这些指标,可以了解系统在不同输入信号下的行为。
在频域内,分析系统的幅值裕度和相位裕度是判断系统稳定性的重要方法。幅值裕度衡量系统在接近幅值边界时的稳定性,而相位裕度则反映系统在接近相位边界时的稳定性。这两个裕度指标确保了系统在受到扰动时仍能保持稳定运行。
MATLAB软件中的Nyquist图和Bode图是进行系统稳定性分析的常用工具。Nyquist图揭示了闭环系统在复平面上的稳定性特性,而Bode图则提供了频率响应的幅度和相位信息。通过这些图形,可以直观地评估系统的稳定性,并为后续的系统校正提供依据。
串联校正是改善系统性能的一种常见方法。在正向通道中引入串联校正装置,如比例、积分或微分环节,可以调整系统的开环增益和相位,以达到所需的闭环特性。此外,为了提高位置随动系统的控制精度,还可以增加系统的开环放大倍数或引入积分环节,这有助于减小稳态误差,确保系统输出能精确跟踪输入的变化。
在设计阶段,作者为该位置随动系统设计了相应的模拟电路,并使用THBCC-2软件进行了仿真验证。模拟电路设计是将理论分析转化为实际硬件的关键步骤,通过仿真可以检验设计是否满足预期的技术指标,并为实际制造提供参考。
位置随动系统的设计和分析是一个综合运用控制理论和电路设计的过程。通过时域和频域分析,以及恰当的校正策略,可以实现高精度、快速响应的位置控制。这种系统广泛应用于工业自动化、机器人技术以及其他需要精确位置控制的领域。

《 自 动 控 制 原 理 》 课 程 设 计 ( 简
明)任务书
引言:《自动控制原理》课程设计是该课程的一个重要教学环
节,既有别于毕业设计,更不同于课堂教学。它主要是培养学生统
筹运用自动控制原理课程中所学的理论知识,掌握反馈控制系统的
基本理论和基本方法,对工程实际系统进行完整的全面分析和综合。
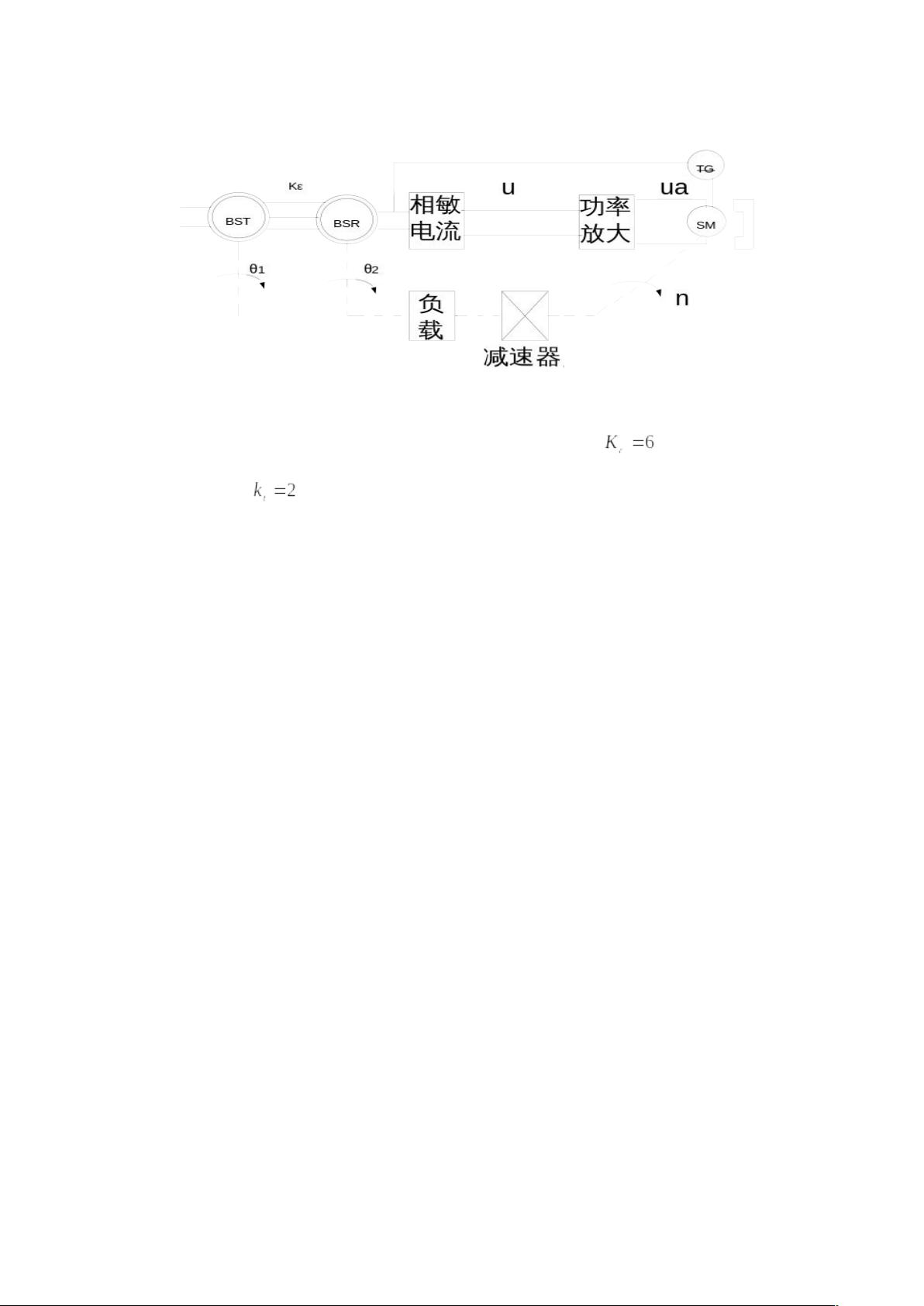
一. 设计题目:位置随动系统的分析与设计
二.系统说明:
该系统结构如下图所示
6
剩余31页未读,继续阅读
点击了解资源详情
188 浏览量
点击了解资源详情
119 浏览量
161 浏览量
190 浏览量
2010-12-29 上传
219 浏览量
2023-07-31 上传

AdilSky
- 粉丝: 31
- 资源: 18
 我的内容管理
展开
我的内容管理
展开







最新资源
- MacPlayer64bit22d-苹果电脑播放器
- 支持图文点击全屏左右切换的jquery瀑布流效果
- phaser-plugin-advanced-timing:显示FPS,帧间隔和性能信息。 移相器2CE
- JS-CSS-Clock:显示实时的模拟时钟。 专为CSS和JavaScript的实践而设计
- WebAccess实战技巧一:按钮条的制作方法.rar
- connmap:connmap是X11桌面小部件,可在世界地图上显示当前网络对等设备的位置(仅使用i3wm进行了测试)。用C和libcairo制成
- 热敏传感器模块(4线制).rar
- 火车头同义词替换库伪原创词库共计16w词
- -演示移动格子
- 带模拟 退火 的 RJMCMC //随机过程_MATLAB_代码_下载
- myPortfolio:React灵敏的投资组合
- 4-互联网(含16).rar
- commons-io2.6.jar
- Construindo-o-seu-primeiro-jogo--de--naves-DIO
- 西门子 Smart Line 精彩系列面板宣传册.zip
- neurolib:易于为计算神经科学家进行全脑建模:brain::laptop::woman_scientist_dark_skin_tone:
