捷联多模导引头解耦设计与应用
需积分: 9 143 浏览量
更新于2024-08-11
收藏 131KB PDF 举报
"捷联多模导引头弹体角运动解耦设计 (2007年),由史震、马澍田、赵妍发表于《弹箭与制导学报》,探讨了捷联导引头输出信号中的弹体姿态角运动信号耦合问题,并提出了解耦方案。"
正文:
在导弹或航空航天领域,捷联导引头是关键的导航与制导系统组成部分,它通过感知目标的位置和速度信息来引导飞行器进行精确打击。然而,捷联导引头的输出信号常常会受到弹体自身的角运动影响,这种耦合信号如果不进行处理,将导致控制系统难以准确地解析目标信息,从而影响飞行轨迹的稳定性和攻击精度。
本研究主要关注如何解决这个问题。作者提出了一种创新方法,即利用直接安装在导引头上的速率陀螺输出的弹体角速度信号,对雷达等传感器的输出信号进行解耦。速率陀螺是一种测量物体旋转速率的传感器,能够精确地提供弹体的角运动信息。通过将这些信息引入到信号处理系统中,可以有效地分离出导引头对目标的感知信号,从而消除弹体角运动的影响。
解耦电路的设计对于多模导引头尤其重要,因为这类导引头通常集成了多种模式的传感器,如雷达、红外、激光等,每种模式的信号都需要独立且准确地处理。文章详细阐述了如何构建这样的电路,以适应不同模式信号的解耦需求。解耦电路的优化设计不仅需要考虑硬件电路的性能,还需要考虑到软件算法的配合,确保在实时性、稳定性以及抗干扰能力等方面达到最佳状态。
论文深入探讨了多通道采样的应用,这是实现解耦的关键技术之一。通过多通道采样,可以分别采集和处理不同传感器的数据,避免信号之间的相互干扰。同时,这种技术也有助于提高系统的鲁棒性,使导引头在复杂的环境条件下也能保持良好的工作性能。
该研究对于推进捷联导引头技术的发展具有重要意义,它提高了导弹或其他飞行器的自主导航和目标追踪能力,对于提升军事装备的战斗力具有实际价值。此外,这一技术同样适用于民用领域的无人机、航空航天探测器等高精度导航系统,对于推动相关领域的科技进步也起到了积极作用。
这篇论文详细介绍了捷联导引头的弹体角运动解耦设计,提供了理论分析和实践方案,对于从事相关领域的科研人员和工程师具有很高的参考价值。通过深入理解和应用这些理论和技术,可以进一步优化导引头的性能,提升整体系统的控制精度和可靠性。
弹 箭 与 制 导 学 报
!%%"
年
!
捷联多模导引头弹体角运动解耦设计
"
史
!
震!马澍田!赵
!
妍
!哈尔滨工程大学自动化学院"哈尔滨
!
SW%%%S
#
摘
!
要!捷联导引头输出的信号中耦合有弹体姿态角运动信号"不宜直接用于弹体控制$文中采用直接安装
在导引头上的速率陀螺输出的弹体角运动信号对雷达输出信号进行解耦
"并针对多模导引头给出解耦电路$
关键词!捷联导引头%解耦%多通道采样
中图分类号
!
ODPQC%&&B
!!
文献标志码!
’
H/>3S
R
+(-
,
H/)(
,
-36
<02*
R
A3@- ’S+0(.3A/<//V/28=3A
5
4-
,
S+*2’30(3-
P)<(F7-
"
^’PFE/914-
"
()’* b4-
!
?,667
.
7,=’E9,>491,-
"
)4:J1-5-
.
1-77:1-
.
+-1A7:B19
C
"
)4:J1-SW%%%S
"
?F1-4
#
4=)02*>0
&
GF7,E9
H
E9,=B9:4
H
L,K-B77\7:1B-,94
HH
:,
H
:14979,J7L1:7896
C
EB7L1-9F78,-9:,6B
C
B97>,=9F7>1BB167
"
=,:
198,E
H
67BK19F9F7>1BB167J,L
C
4-
.
E64:>,91,-RGF1B4:91867
H
:7B7-9B4L78,E
H
61-
.
>79F,L
"
KF18FEB7B9F7L78,E
H
61-
.
B1
.
-46=:,>9F7:497
.C
:,B8,
H
7B
H
781466
C
1-B94667L,-9F7B77\7:
"
=,:9F7:4L4:,E9
H
E9L78,E
H
61-
.
R^74-KF1674
H
:4891846
81:8E194
.
41-B9>E691>,L7B77\7:L78,E
H
61-
.
1B46B,
H
:7B7-97LR
?/
5
@32A)
&
B9:4
H
L,K-B77\7:
%
L78,E
H
61-
.
%
>E6918F4--76B4>
H
61-
.
B
!
引言
在捷联导引头中"雷达天线测得的信号是目
标偏离弹轴的角度$ 因而弹体的角运动就会耦
合到雷达输出信号中$ 弹体的角运动频率比视
线角运动频率大很多"这样"耦合有弹体角运动
的导引信号对弹体控制是不利的$采用解耦后"
雷达输出的信号不再与弹体角运动有关"这是解
耦技术的中心思想"各种解耦方法也是围绕此思
想展开的$根据解耦信号的来源可以分为利用
陀螺信号进行解耦方法和利用惯导信号进行解
耦方法$根据解耦实施方法可以分为波束调节
直接解耦法和数学解算间接解耦法"后者又根据
解算算法分为&矩阵变换法’卡尔曼滤波法和信
号补偿法$通过分析各种解耦方法的优缺点和
参考随动导引头解耦技术"文中提出利用速率陀
螺输出的弹体角运动信号对雷达输出信号进行
解耦的方案$
"
!
设计原理
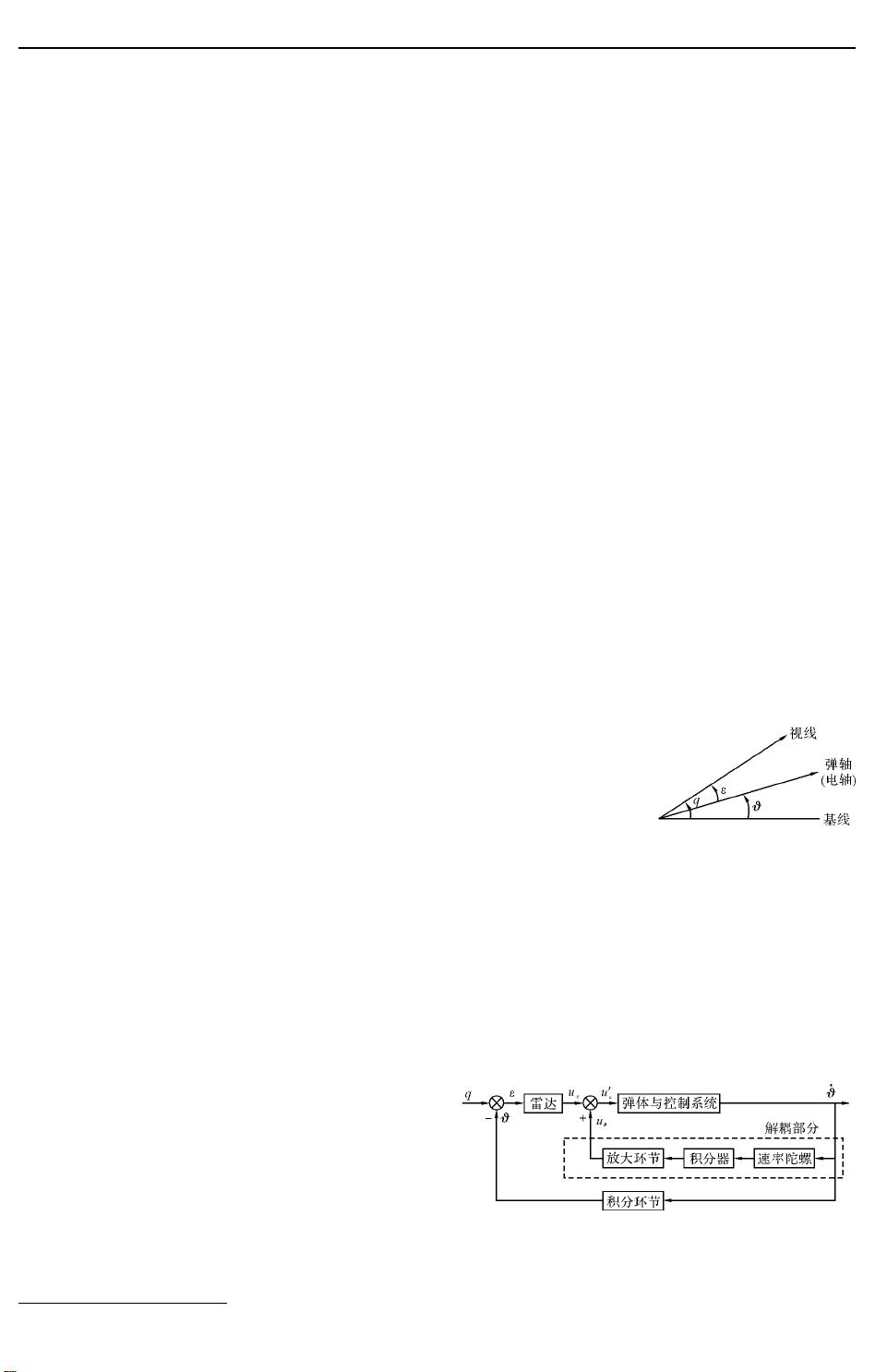
图
S
!
俯仰平面内捷
联导引头各角
度之间的关系
滚 动 通 道 控 制 回
路稳定的 弹体"弹体 的
滚动角
7
(
%
或
7
:
%
"
在此情况 下"捷联 导 引
头 弹 上 雷 达 对 目 标 的
测 量 分 别 在 两 个 平 面
内完成"俯仰平面 和 航
向平面$因而解耦也分别在这两个平面内完成$
以俯仰通道为例进行说明$由于雷达的电轴和弹
轴重合"因而俯仰平面内各角度的关系如图
S
所
示$图 中&
X
为 视 线 角%
,
为 弹 体 俯 仰 角%
3
为 偏
差角$
图
!
!
捷联导引头采用速率陀螺信号解耦方框图
设雷达开机时刻
6
%
为初始时刻"未采用解耦
(
%#
(
"
收稿日期!
!%%&U%TU%W
%
!!
修回日期!
!%%&USSU!V
作者简介!史震!
ST&SU
#"男"教授"研究方向&导航’制导与控制$
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-02-24 上传
2021-04-15 上传
2021-09-16 上传
2021-09-19 上传
2021-02-20 上传
2021-09-26 上传

weixin_38622827
- 粉丝: 4
- 资源: 904
 我的内容管理
展开
我的内容管理
展开







最新资源
- [Trump Pussifier]-crx插件
- React-ClimaApi:Consumir api de clima
- JSON-Parsing:在RecyclerView中使用翻新并使用Glide库加载图像的JSON解析
- node_GyazoServer:这很疯狂
- sharding-sphere-demo 分表分库
- donut
- 电信设备-基于相移开关键控的混沌多方环形双向通信系统.zip
- REDO:REDO-细胞器中的RNA编辑检测-开源
- 0.5mm间距BGA封装库BGA芯片封装ALTIUM库(AD库PCB封装库 ).zip
- alice-legacy:一个管理车间的软件
- 可改变闪光灯PLC程序.rar
- docs-boomi-data-services
- hi5:Hi5项目-家庭理财
- maven-sample
- 艺术漫画创意手机网站模板
- 易语言-易语言免登录获取QQ/昵称/头像/在线状态
