互质因子扰动下系统的非脆弱鲁棒稳定性研究
74 浏览量
更新于2024-09-07
收藏 219KB PDF 举报
本文主要探讨了在信息技术领域,针对存在不确定性的控制系统,尤其是当被控对象和控制器都受到互质因子摄动时的非脆弱鲁棒控制问题。系统稳定性是控制系统设计的核心考量,通常,鲁棒稳定性关注的是标称系统设计的控制器如何确保在受到被控对象的摄动后,闭环系统的稳定性依然能得到保持。然而,现实中的控制系统往往同时面临来自对象和控制器两方面的不确定性。
研究者针对左互质因子摄动和右互质因子摄动两种情况,深入分析了反馈系统的非脆弱鲁棒稳定性和性能敏感性。非脆弱控制强调即使在存在扰动的情况下,系统仍能维持基本性能或恢复到接近标称状态的能力,这区别于传统的鲁棒稳定性,后者仅关注在一定范围内的摄动下的稳定性保持。
作者提供了在特定条件下系统实现非脆弱鲁棒稳定性的充分条件,这些条件对于控制器设计和系统优化具有重要的指导意义。通过比较左互质因子摄动和右互质因子摄动两种情况,论文揭示了它们在系统非脆弱鲁棒稳定性上的关系,这对于理解和优化系统的整体性能具有实际价值。
本文的关键技术手段是互质因子摄动描述,这种方法无需对被控对象和控制器做出过于严格的假设,使得研究结果具有更广泛的适用性。此外,通过对系统灵敏度的分析,本文还涉及到了系统对干扰的抑制能力和鲁棒性能,这些都是现代控制系统设计中不可或缺的考量因素。
总结来说,本文为解决实际工程中的复杂控制系统问题提供了一种新的思考框架和理论支持,对于提升系统的鲁棒性、非脆弱性和抗干扰性能具有重要意义。
*?
第
4
3
卷
第
6
期
2012
年
11
月
太原理工大学学报
JOURNAL
OF
TAIYUAN
UNIVERSITY
OF
TECHNOLOGY
V
ol.43 No.6
Nov.2012
文章编号
:
1007
-
9
432
(
2012
)
06
-
0
723
-
0
4
互质因子摄动系统的非脆弱控制
孟
新宇
1
,
2
,
宁
辉
1
,
王
道波
1
,
王
西超
1
(
1
.
南京航空航天大学 自动化学院
,
南京
210016
;
2.
西北核技术研究所
,
乌鲁木齐
841700
)
摘
要
:
研究
了被控对象和控制器均存在不确定时闭环系统鲁棒稳定性和非脆弱控制问题
,
分
别讨论了左互质因子摄动和右互质因子摄动情况下反馈系统的非脆弱鲁棒稳定性和性能敏感性问
题
,
并给出了相应条件下系统非脆弱鲁棒稳定的充分条件
,
最后给出了两种情况下系统非脆弱鲁棒
稳定性之间的关系
。
关键词
:
非脆弱
;
互质因子
;
稳定性
中图分类号
:
T
P273
文献标识码
:
A
控制
系统的鲁棒稳定性是指按标称系统设计的
控制器
,
能使摄动后的系统在某种度量意义下
,
其附
近的一族系统均稳定
。
在目前大部分相关文献中
,
通常仅对被控对象摄动情况下的闭环系统的鲁棒稳
定性进行了分析
[
1
-
2
]
。
然
而
,
在实际问题中
,
由于元
件老化
、
参数漂移等多种因素
,
控制器本身的摄动也
是不可避免的
。
众所周知
,
系统的各项性能指标在
摄动情况下不一定能够维持
,
因此
,
近年来系统的性
能指标对摄动的敏感性
、
鲁棒稳定性以及非脆弱性
等问题
,
已逐渐成为国内外学者理论研究的热点
,
并
已初步取得一些研究成果
[
3
-
4
]
。
在
众多研究方法中
,
互质因子摄动描述已被证明是一种有用的不确定性
描述方法
,
它允许摄动后的系统与标称系统有不同
的不稳定极点和不稳定极点的数目
,
且不需要对被
控对象和控制器作某些附加的假设
,
因此研究互质
因子摄动 系 统 的 非 脆 弱 鲁 棒 性 问 题
,
更 具 普 遍 意
义
[
5
-
7
]
。
另
外
,
工程上要求系统应有良好的干扰抑制
能力
,
而灵敏度正反映了系统对干扰的敏感性
。
本
文运用该方法
,
对系统对摄动的灵敏度
、
鲁棒稳定性
及非脆弱性进行讨论
。
1
问
题描述
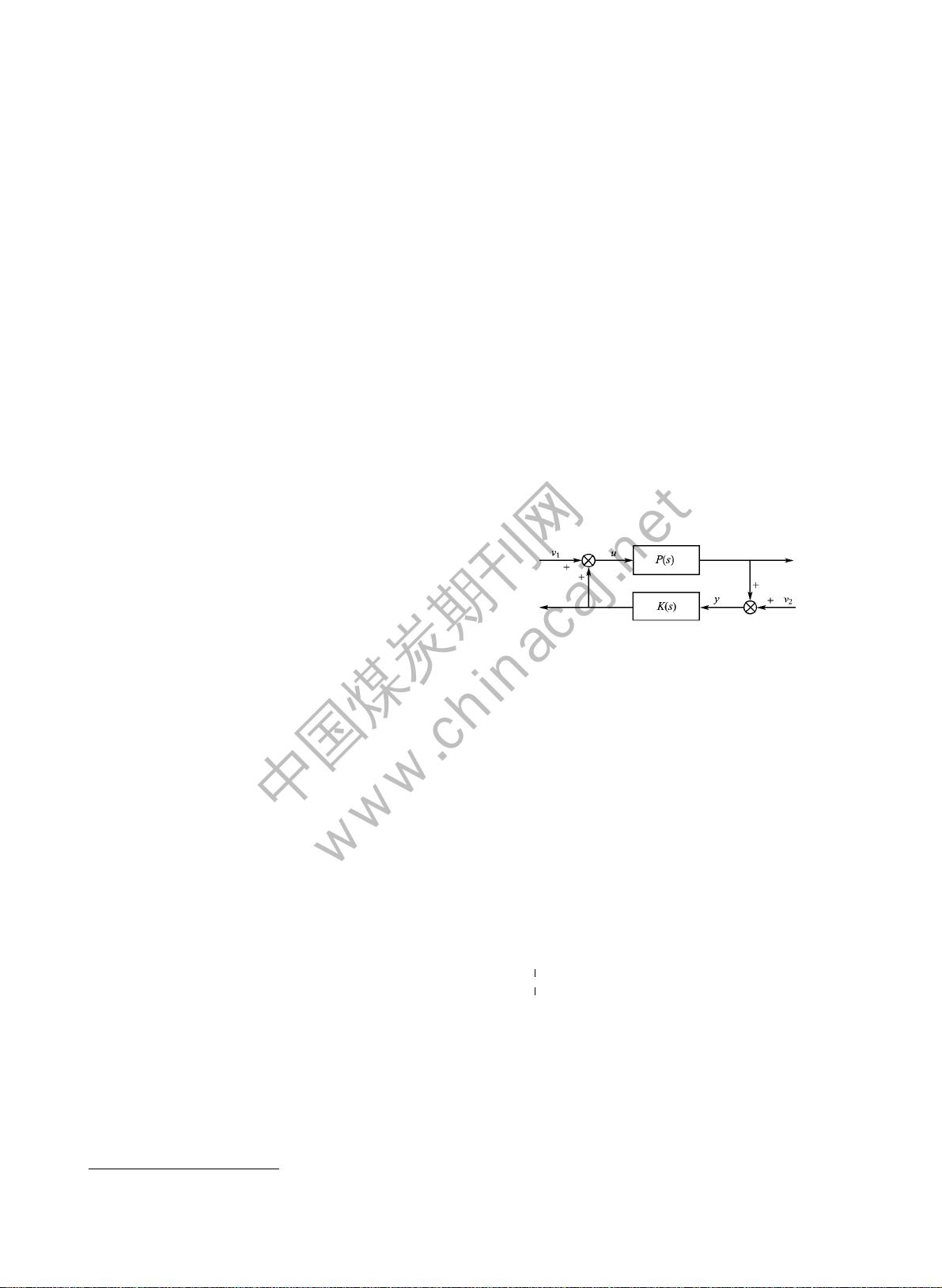
考
虑图
1
所示的标称反馈系统
,
不难得出
I
-
K
-
[
]
P
I
[
]
u
y
=
v
1
v
[
]
2
.
(
1
)
当
矩阵
I
-
K
-
[
]
P
I
.
图
1
反
馈系统
可
逆时
,
方程
(
1
)
有唯一解
,
称系统
(
1
)
是适定的
。
图
1
反馈系统适定的充分条件是
P
(
s
)
为
严 格 真 的
。
假定
P
(
s
)
满
足严格真的条件
,
则由式
(
1
)
得
v
1
v
[
]
2
→
[
]
u
y
的闭环传递函
数为
H
(
P
,
K
)
=
(
I
-
K
P
)
-
1
(
I
-
K
P
)
-
1
K
P
(
I
-
K
P
)
-
1
I
+
P
(
I
-
K
P
)
-
1
[
]
K
.
(
2
)
称
S
(
P
,
K
)
=
(
I
-
K
P
)
-
1
为系统的灵敏度函
数矩
阵
,
它反映了系统对外部干扰的敏感性
。
对
P
(
s
)
和
K
(
s
)
作
双互质分解
P
(
s
)
=
N
(
s
)
M
-
1
(
s
)
=
珮
M
-
1
(
s
)
珦
N
(
s
)
,
K
(
s
)
=
U
(
s
)
V
-
1
(
s
)
=
珟
V
-
1
(
s
)
珦
U
(
s
)
烅
烄
烆
.
(
3
)
在
以下讨论中均要求
K
(
s
)
能
镇定
P
(
s
)
,
即
有
H
(
P
,
K
)
∈
R
H
∞
,
从而可推断出灵敏度
函数矩阵
S
(
P
,
K
)
∈
R
H
∞
。
设
灵敏度函数 矩阵
S
(
P
,
K
)
和
闭环传递
函数阵
H
(
P
,
K
)
的
H
∞
范
数满足以下约束
:
‖
S
(
P
,
K
)
‖
∞ <
h
1
,
‖
H
(
P
,
K
)
‖
∞ <
h
2
(
4
)
式
中
,
h
i
(
i
=
1
,
2
)
为
正常数
。
*
收
稿日期
:
2
012
-
0
5
-
2
1
基
金项目
:
部委级基金资助项目
(
“
8
63
计
划
)
(
2
011SY
*
*
3
2
)
作
者简介
:
孟新宇
(
1
977-
)
,
男
,
山
西岚县人
,
博士生
,
主要从事飞行控制和航空仿真的研究
,
(
T
el
)
13779239909
中国煤炭期刊网
www.chinacaj.net
下载后可阅读完整内容,剩余4页未读,立即下载
2024-05-11 上传
2023-04-11 上传
2023-05-20 上传
2023-04-11 上传
2023-06-06 上传
2023-03-28 上传
2023-05-21 上传
2023-09-15 上传
2023-06-06 上传

weixin_38588394
- 粉丝: 8
- 资源: 954
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
