Python初学者指南:IDLE的全面使用与调试教程
版权申诉
90 浏览量
更新于2024-08-03
收藏 1.05MB PDF 举报
"《循序渐进学Python:IDLE的运行、编辑与调试总结》是一份详细的教学资料,主要针对Python初学者介绍了如何使用Python的集成开发环境IDLE。IDLE作为Python的内置工具,对于编写、运行、测试和调试Python程序具有重要意义。
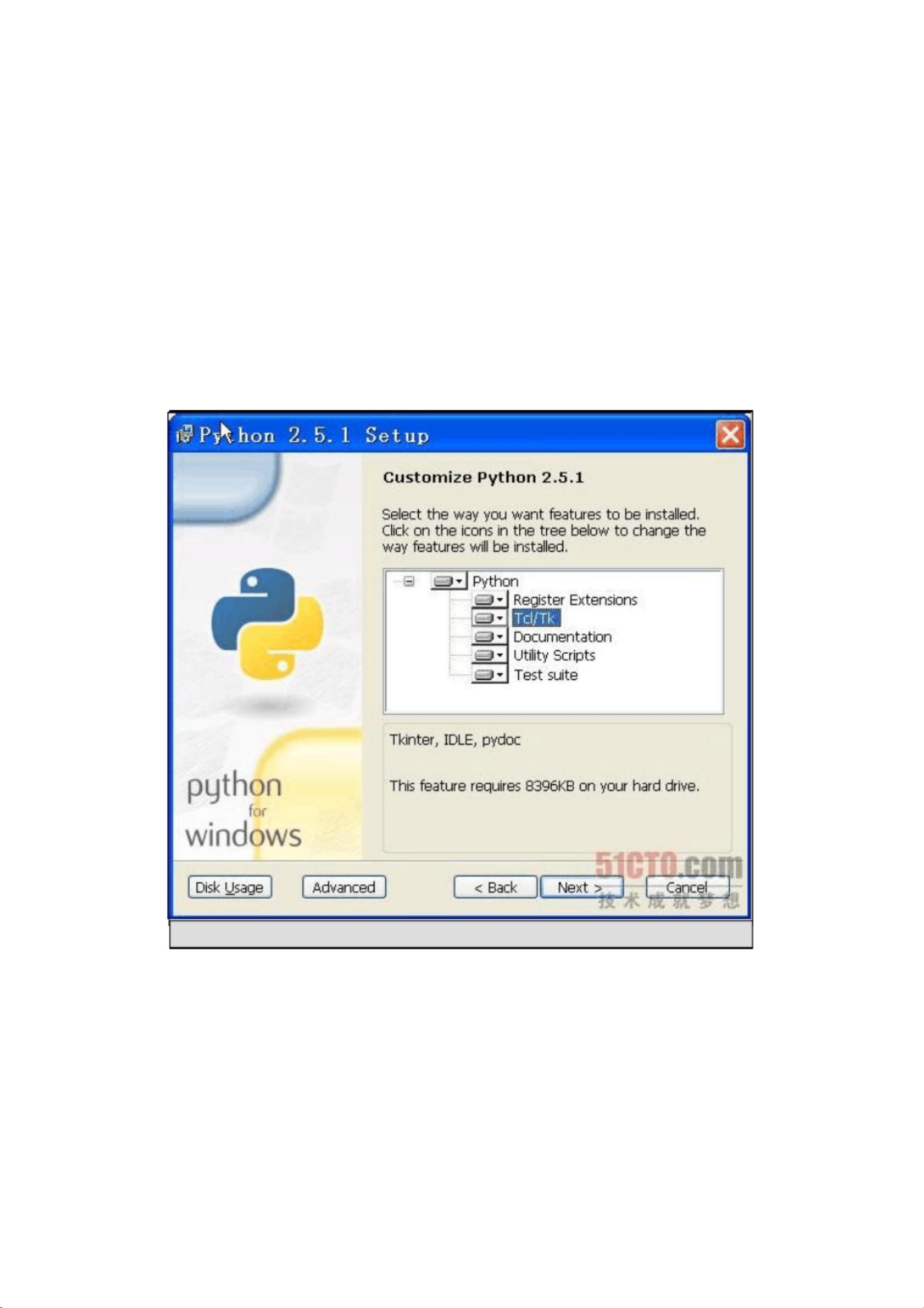
1. IDLE的安装:文章强调在安装Python时,务必确保选择了包含"Tcl/Tk"组件,因为它是IDLE正常运行的基础。如果没有选中,可能会影响到IDLE的功能。
2. IDLE的启动与界面:IDLE可通过开始菜单中的Python路径启动,初次打开时会显示Python Shell,这是交互式环境,用户可以直接在这里输入并执行Python代码。此外,它还包含一个编辑器用于编写代码,一个交互式解释器以及一个调试器,这些都是Python开发的重要组成部分。
3. 编辑器功能:IDLE的编辑器提供了诸如自动缩进、语法高亮、单词自动完成等实用特性,这些可以提升编程效率。例如,代码示例展示了如何获取用户输入并进行简单的比较操作。
4. 创建Python程序:通过"NewWindow"菜单创建新文件,读者可以实际操作IDLE的编辑器,体验编写Python程序的过程。通过实例演示,学习者能更好地理解和掌握IDLE的使用。
这份文档为学习者提供了一个系统的学习路径,从IDLE的安装基础到实际操作,帮助他们逐步掌握Python编程环境的使用,对初学者来说是一份宝贵的参考资料。"
循序渐进学 Python :IDLE 的运行、编辑与调试( 1)
IDLE 是 Python 软件包自带的一个集成开发环境,初学者可以利用它方便地创建、运
行、测试和调试 Python 程序。本文将详细介绍 IDLE 的 GUI 界面、 Python Shell 、编辑器
和调试器,为初学者快速上手助一臂之力。
一、IDLE 的安装
实际上, IDLE 是跟 Python 一起安装的,不过要确保出现图 1 所示的安装画面时选中了
“Tcl/Tk ”组件,准确地说,应该是不要取消该组件,因为默认时该组件是处于选中状态
的。
图 1 IDLE 的安装
二、IDLE 的启动
安装 Python 后,我们可以从“开始”菜单→“所有程序”→“ Python 2.5 ”
→“IDLE( Python GUI)”来启动 IDLE。IDLE 启动后的初始窗口下图所示:
下载后可阅读完整内容,剩余6页未读,立即下载
2023-01-06 上传
2022-07-01 上传
2023-06-07 上传
2023-05-31 上传
2023-06-03 上传
2023-06-07 上传
2023-07-15 上传
2023-05-30 上传


xox_761617
- 粉丝: 29
- 资源: 7802
 我的内容管理
展开
我的内容管理
展开







最新资源
- 特殊的东西
- sqlite-snapshot-202101271915.tar.gz
- darklaf:Darklaf-基于Darcula-Laf的主题化Swing外观
- MyFinance-Backend:应用程序记录您的钱
- pdgrab
- JavaWeb课设-报名系统.zip
- 虚拟内存管理器:设计的虚拟内存管理器,可将逻辑地址转换为物理地址
- adbGUI:用C#编写的Android调试桥(ADB)包装
- Filter Only Debugs (like Developer Console)-crx插件
- matlab二值化处理的代码-clipper:稳健的成对数据关联的图论框架
- BUPT 数据库课程设计.zip
- Portfolio_site
- Jupyter-Book-Demo
- MIPS_OperatingSystem:BUAA操作系统
- spring-parent:学习 Spring 的练习项目,用于记录学习过程的知识点及问题,及整合其他框架
- laravel-http-stats
