Multisim模拟汽车尾灯控制系统设计
48 浏览量
更新于2024-08-31
3
收藏 630KB PDF 举报
"基于Multisim的汽车尾灯控制系统设计,使用LED模拟指示灯,通过主从JK触发器构建3进制计数器,配合74LS138D3线-8线译码器实现不同驾驶状态下的灯光控制。"
在LED照明技术中,汽车尾灯的控制设计至关重要,因为它直接影响到行车安全。本设计利用Multisim这个强大的电路仿真软件,模拟实际电路的功能,以满足特定的汽车尾灯操作需求。Multisim能精确地模拟各种电路行为,方便设计者在虚拟环境中调试和验证电路设计。
设计的核心是根据汽车的不同行驶状态控制尾灯的亮灭和闪烁。首先,当车辆正常行驶时,所有尾灯保持熄灭状态。左转弯时,左侧的三个LED指示灯按照特定顺序依次点亮,形成向左的动态效果。右转弯则相反,右侧的三个LED指示灯按右循环顺序点亮,指示转向方向。而在临时刹车的情况下,所有的LED指示灯会同时闪烁,以引起后方驾驶员的注意。
为了实现这种控制,设计中采用了主从JK触发器来构建一个3进制计数器。主从JK触发器是一种时序逻辑电路,能够根据输入信号的变化产生稳定的时序输出,从而控制LED的亮灭顺序。通过JK触发器的Q、Q'输出状态变化,可以实现计数器的递增或递减,进而控制LED的点亮顺序。
接下来,设计中使用了74LS138D3线-8线译码器来控制这些LED指示灯。74LS138D是一种数字逻辑器件,它能够将3位二进制输入转化为8条独立的输出线,这里只使用了6条来驱动6个LED。译码器的输入由三进制计数器的输出和开关控制电路共同决定,根据输入信号的状态,译码器产生相应的逻辑电平来驱动LED,从而控制它们的亮灭。
开关控制电路则由两个开关组成,用于切换汽车尾灯的工作模式。这两个开关可以改变进入译码器的控制信号,使得译码器根据不同的输入组合控制LED的亮灭,实现不同驾驶状态的灯光显示。
总结来说,这个基于Multisim的汽车尾灯控制系统设计巧妙地结合了数字逻辑电路和模拟电子技术,通过主从JK触发器的计数功能和74LS138D译码器的逻辑转换,成功实现了对汽车尾灯的智能控制。这样的设计不仅提高了汽车的安全性,也为电子电路设计提供了一个生动的教学案例。
LED照明中的基于照明中的基于Multisim的汽车尾灯控制设计的汽车尾灯控制设计
本文设计一种基于Multisim的汽车尾灯控制设计,要求实现汽车左转弯、右转弯、停止等条件下尾灯的点亮与熄
灭情况。Multisim具有电脑模拟各种电路功能,其运用各种仿真器件可达到现实器件同样的功能效果。 设
计要求 假设汽车尾部左右两侧各有三个指示灯(用发光二极管模拟) 1、汽车正常运行时指示灯全
灭; 2、左转弯时左侧3个指示灯按左循环顺序点亮; 3、右转弯时右侧3个指示灯按右循环顺序点亮;
4、临时刹车时,所有指示灯同时闪烁。 设计内容包括运用主从JK触发器构成一个3进制计数器,为汽
车尾灯按左(右)循环闪烁控制电路的设计提供脉冲;并使用74LS138
本文设计一种基于Multisim的汽车尾灯控制设计,要求实现汽车左转弯、右转弯、停止等条件下尾灯的点亮与熄灭情况。
Multisim具有电脑模拟各种电路功能,其运用各种仿真器件可达到现实器件同样的功能效果。
设计要求设计要求
假设汽车尾部左右两侧各有三个指示灯(用发光二极管模拟)
1、汽车正常运行时指示灯全灭;
2、左转弯时左侧3个指示灯按左循环顺序点亮;
3、右转弯时右侧3个指示灯按右循环顺序点亮;
4、临时刹车时,所有指示灯同时闪烁。
设计内容包括运用主从JK触发器构成一个3进制计数器,为汽车尾灯按左(右)循环闪烁控制电路的设计提供脉冲;并使
用74LS138D3线-8线译码器来控制指示灯的亮灭情况。设计一个开关控制电路,来控制尾灯的闪烁,并决定74LS138D译码器
的工作情况。
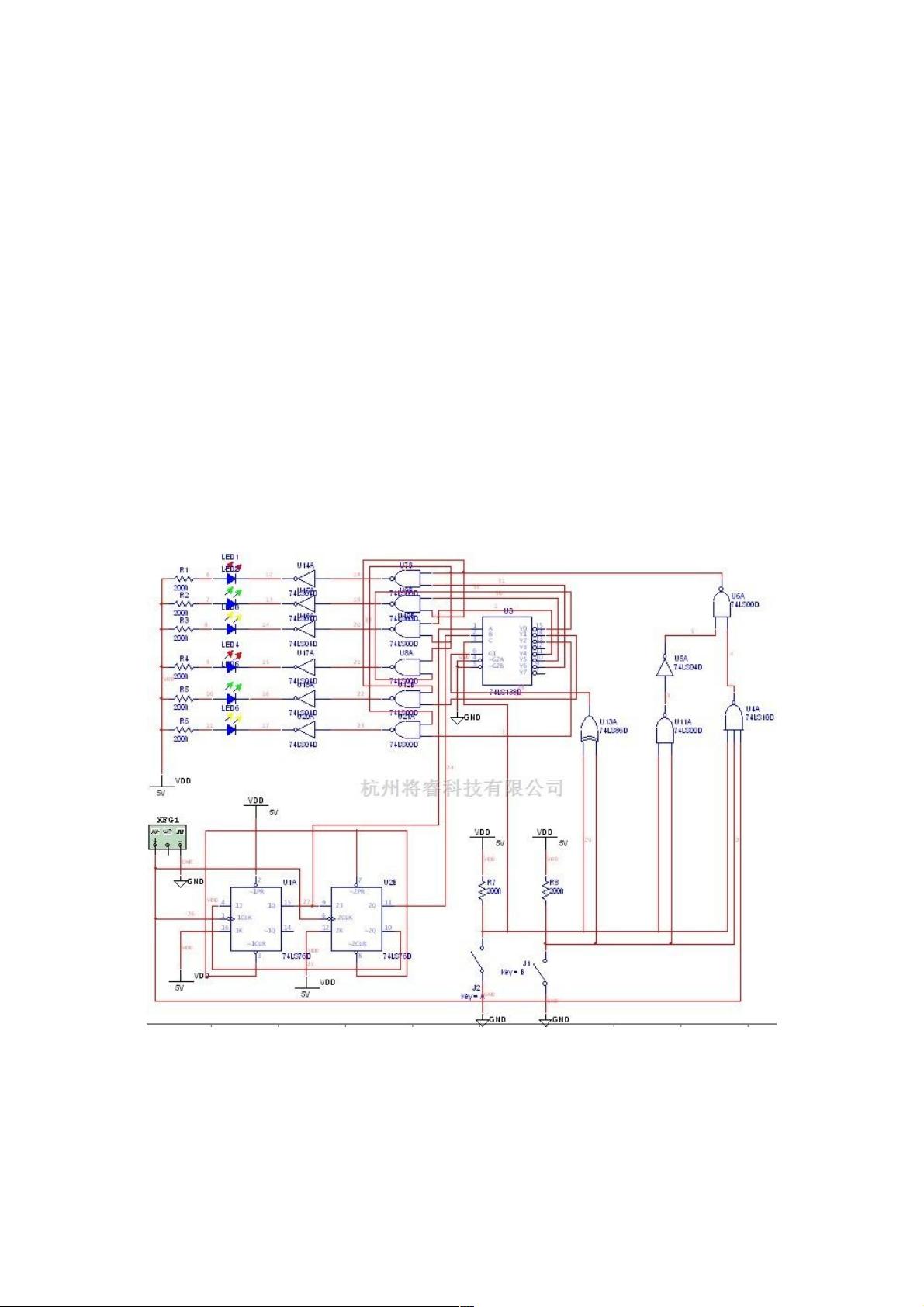
总电路图
1.汽车尾灯控制电路汽车尾灯控制电路
下载后可阅读完整内容,剩余5页未读,立即下载
2021-06-29 上传
2009-12-22 上传
2010-04-29 上传
2023-12-24 上传
2023-05-16 上传
2023-06-06 上传
2024-06-12 上传
2023-05-11 上传
2023-05-11 上传

weixin_38610682
- 粉丝: 6
- 资源: 878
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
