三菱伺服控制案例详解:原点回归与速度切换方法
需积分: 46 21 浏览量
更新于2024-07-18
收藏 836KB PDF 举报
本文档主要探讨了三菱伺服控制案例,由欧阳青云提供,详细介绍了三菱伺服系统的操作流程和编程示例。以下是核心知识点的详细解析:
1. **原点回归程序示例**:
- 原点回归是通过M1250指令启动,配合Y50定位启动、Y44轴停止和Y40PLC准备完成等步骤进行。M1081设置电机在手动模式下,M6401发出原点回归启动条件输出脉冲。使用[T0H4K1500K9001K1]专用指令,其中T0是定时器,H4指硬件地址,K1500是定位指令,K9001表示机械原点回归,而K1是设定值。
- 当原点回归进行中,指示灯会每0.5秒闪烁一次,Y50输出定位启动信号。X50和X4C信号分别表示动作完成和电机忙碌状态。M6501保持输出直到动作完成,直到遇到M6701检测到电机SERVOERROR或YA42电机M/C电源断开,才会复位。
2. **全范围原点回归程序示例**:
- M1290是启动开关,M1001要求在手动模式下执行原点回归。M100输出需要维持处理。断开条件包括M101原点回归完成,M1012复位按键,以及M105紧急停止开关。原点回归完成后,状态指示显示所有电机完成。
3. **JOGSPEED的更改**:
- 通过M1055、M1053和M1051这三个速度选择按键,用户可以实时调整伺服系统的JOG速度。SM400始终接通,允许在任何时候通过DMOV和D32数据传送指令改变速度值,存储在D120字地址中,使用DTOH4K1518D120K1指令进行写入。
4. **SERVOERROR复位**:
- 伺服系统出现ERROR时,可通过特定的复位专用指令如K1502、K1602、K1702和K1802来复位。复位过程涉及轴出错信号的处理,当复位开关被触发时,执行相应的复位操作以恢复正常工作。
这些示例展示了三菱伺服控制系统中的基本操作流程、编程逻辑和故障处理机制,对于理解和应用三菱伺服控制技术具有重要的参考价值。
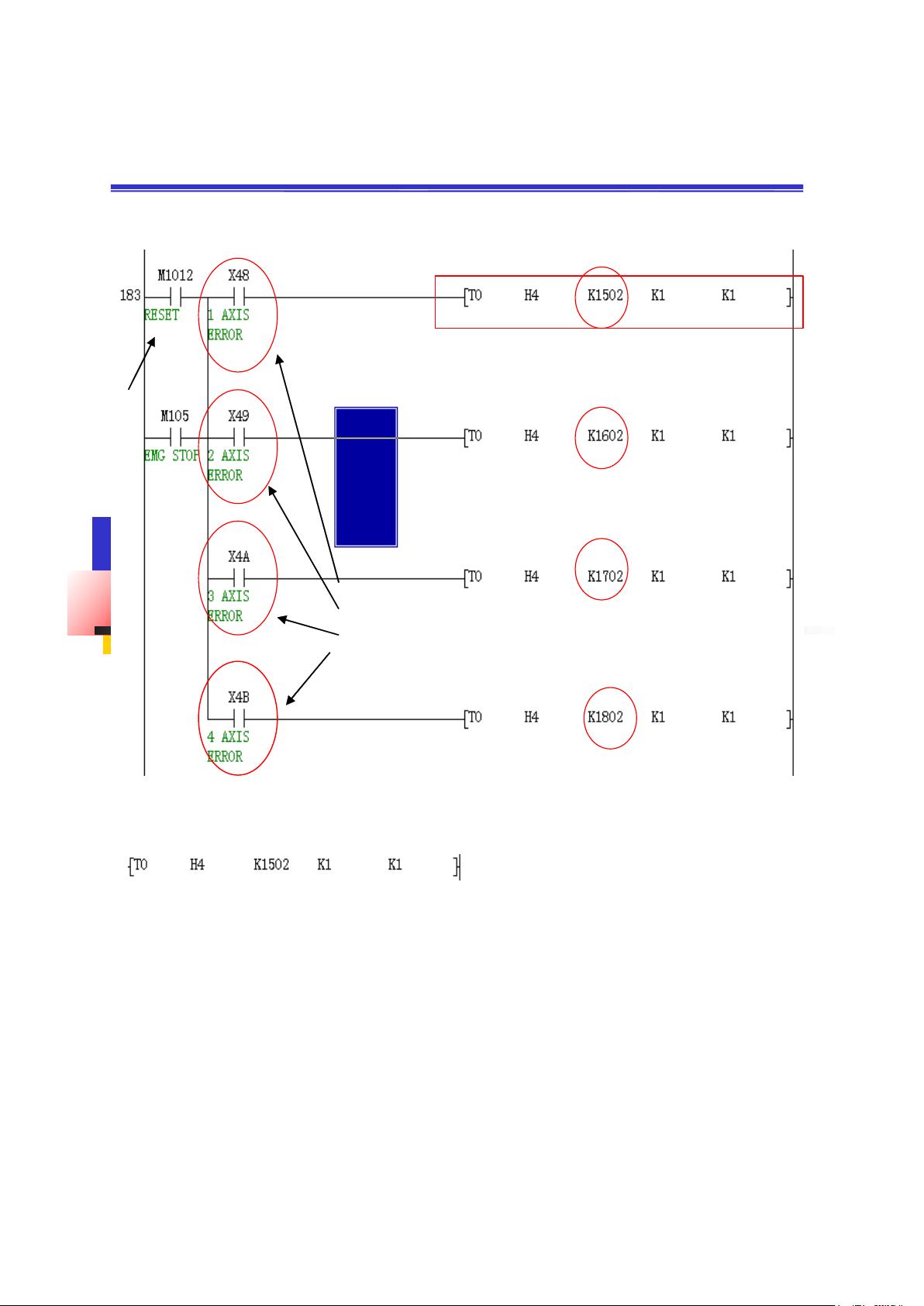
5.SERVO ERROR
的复位专用指令和写法
复位专用指令
轴出错信号
复位
开关
伺服
ERROR
故障复位专用指令和写法
K1502 K1602 K1702 K1802 是对各个轴出错复位的专用代码
轴一
轴二
轴三
轴四
当轴发生出错时,相对应得轴会自动接通出错信号,依次是轴一 x48
轴二
X49
轴三
x4a
轴四
X4B
当故障解决后,需要对
QD75
的报警进行复位处理,需要在程序中编写一个
复位开关,当开关接通后,执行私服复位的专用指令,将故障消除。
5
剩余28页未读,继续阅读
2020-03-27 上传
2020-07-15 上传
2024-09-14 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_42169416
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
