FANUC机器人操作手册:安全与编程详解
需积分: 41 55 浏览量
更新于2024-07-15
1
收藏 23.9MB PDF 举报
FANUC机器人操作手册是一份详细指导FANUC机器人操作、安装、维护和编程的重要参考资料。手册主要涵盖了以下几个核心部分:
1. **绪言**:
- 手册说明:强调了手册的用途,包括如何使用手册中的信息、产品规格以及相关配套文档,确保用户了解其在操作过程中的角色和安全注意事项。
- 安全防护:强调了安全的重要性,提供了一般性的安全防护措施,确保操作人员在使用过程中遵循严格的安全规程。
2. **概述**:
- **点焊工具软件**:这部分介绍了点焊工艺的相关软件设置,包括系统设置、手动和自动操作模式,以及如何进行测试和程序编写。
- **机器人与控制器**:详细描述了FANUC机器人的结构和控制器功能,如教导盒(用于编程和示教)、操作面板、远程控制器、通讯接口、输入输出控制、外围设备接口以及机器人的动作控制、紧急停机装置和扩展轴。
3. **焊接工序**:
- 点焊输入:涉及具体的焊接操作参数和输入设置。
- 输入输出(I/O)管理:涵盖了数字I/O、I/O组、模拟I/O的使用,以及机器人、外围设备和操作面板的I/O设置,以及I/O链接界面和功能的详细配置。
4. **程序设置与操作**:
- 设置自动操作:包括机器人服务请求、程序号选择、坐标系设置(工具、用户、手动)以及参考位置等。
- 用户警告和系统配置:强调了用户在操作过程中的注意事项,如系统配置菜单、通用项目设置和特殊选项等。
- 程序结构:详细解释了程序的构成,如程序名、注释、子类型、组标志、写保护、中断屏蔽等,以及动作指令(如动作类型、位置数据、进给速度和路径设定)和点焊指令的具体操作。
这份操作手册对于FANUC机器人的使用者来说,是一本不可或缺的参考书,提供了深入理解机器人工作原理、编程技巧以及确保安全操作的宝贵资源。通过学习和遵循手册中的内容,操作员能够有效地提高工作效率,降低故障率,并确保生产线的顺畅运行。
16
编程注意事项
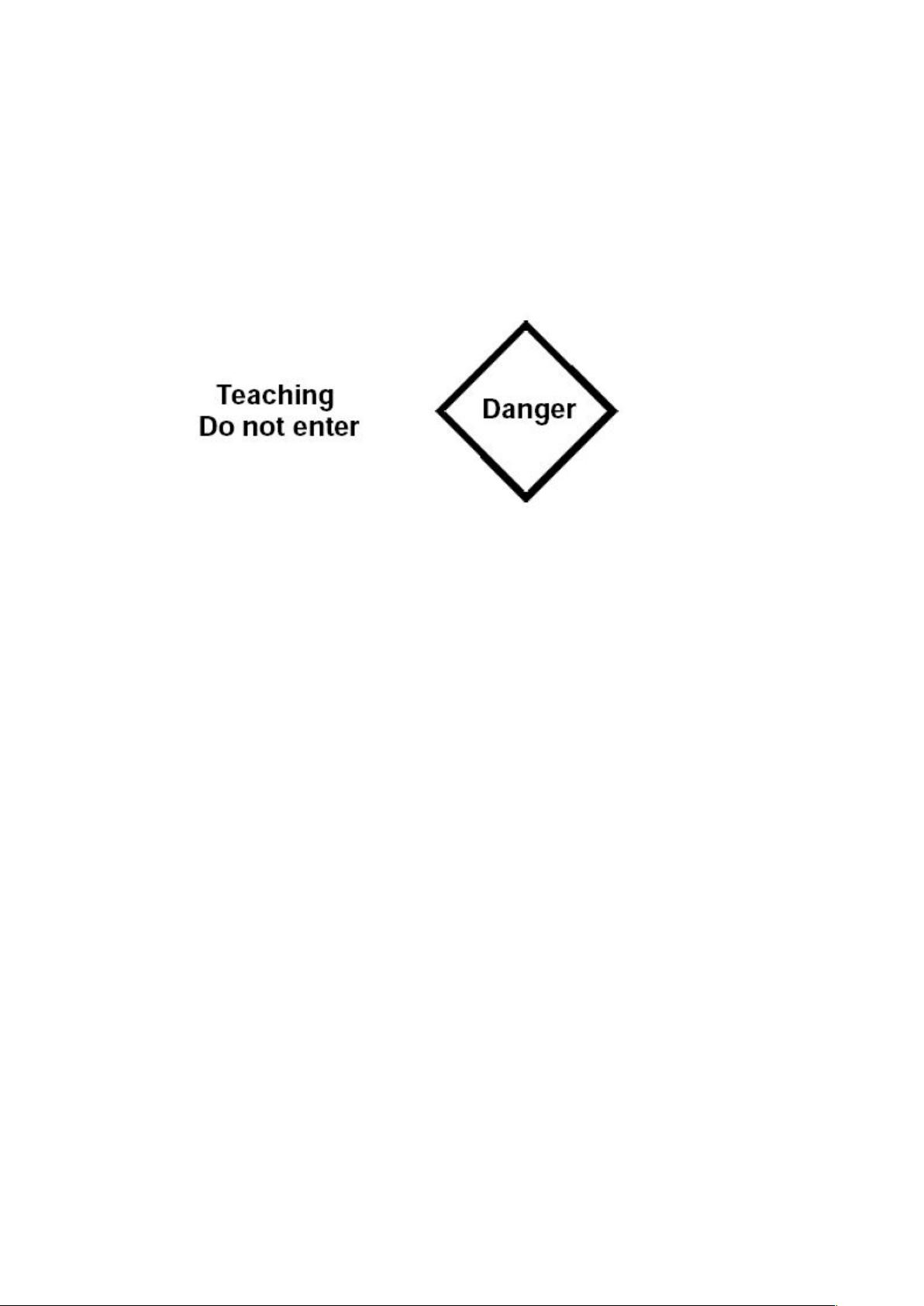
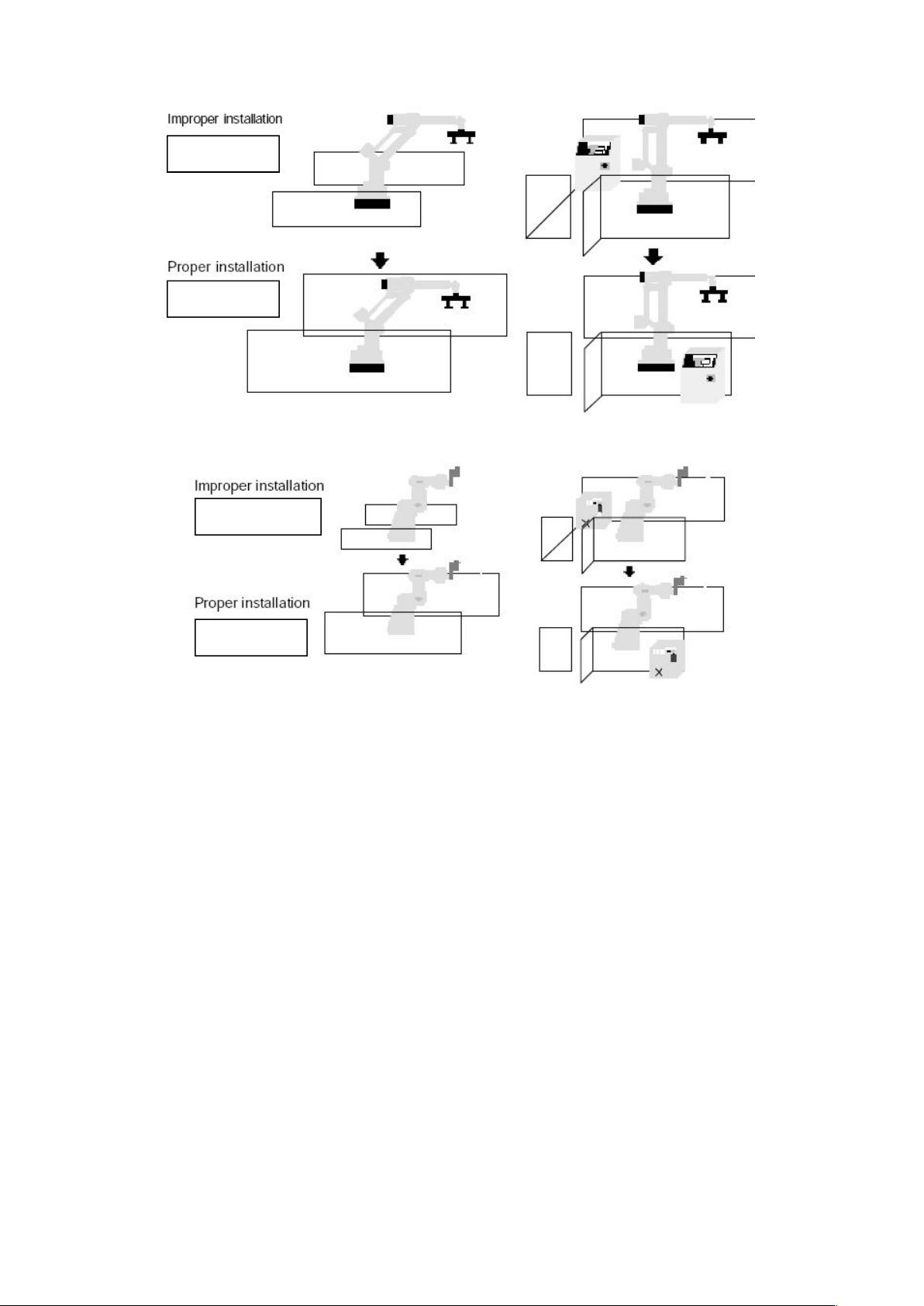
警告:应该在安全护栏区域外,尽可能远的地方编程。如果程序需要在安全护栏区域内完成
程序员应该遵守如下事项:
-- 在进入安全护栏区域内前,确认在区域中没有危险位置的风险。
-- 随着准备按紧急停机按钮。
-- 机器人应该在低速运行。
-- 程序运行前,检查整个系统状态,确认没有到外围设备的远程指令,确认没有动作
对使用者有威胁。
注意:编程结束后,根据制定的步骤,给出相应的文字说明。(参见本手册中程序执行的章
节)。在文字说明中,工人必须在安全护栏区域外。
说明:程序员应该在FANUC接受适当的培训。
维护注意事项
警告:在维护中,机器人和系统应该在断电状态。如果系统和机器人在电源开的状态下,一
个维护操作可能会引起冲击性的危害。如果必要,应该提供相应的安全锁,以防止其
他人打开机器人或者系统的电源。如果维护需要在电源开的状态下进行,紧急停机按
钮需要保证可用,
警告:替换零件时,维护工人应该阅读维护手册,预先学习复位步骤。如果进行了错误的步
骤,可能会引起事故,导致对机器人的损伤并伤害到工人。
警告:当要进入到由安全护栏封闭的区域时,维护工人应该检查整个系统,确认没有危险位
置。在存在危险位置时,如果工人需要进入这个区域,工人必须时刻保持十分小心,
检查当前系统状态。
警告:零件的更换应该按照FANUC的建议执行。如果应用其他零件,可能会发生故障或者
损害。特别指出的是,请不要应用FANUC没有推荐的保险丝。这样的保险丝可能会
导致火灾。
警告:当移除一个马达或者制动器时,应该用起重机或者其他设备预先支撑机器人的手臂,
这样在装卸中,手臂不会坠落。
警告:如果在维护中需要让一个机器人进行一个动作,应该采取以下的保护措施:
-- 维护工作中,使逃离通道顺畅,时刻检查整个系统的动作,以便通道不被机器人
或者外围设备阻挡。
-- 时刻注意危险位置的威胁,做好随时按紧急停机按钮的准备。
警告:当拧动马达、制动器或者其他重的负载时,应该用起重机或者其他装备保护维护工人
不承受过量负载。否则,维护工人可能会受到严重伤害。
注意:只要有油脂洒落在地面,就应该尽快擦除以避免危险的滑倒。
注意:在维护过程中,不要攀爬机器人。这样的尝试会导致对机器人的不利的影响。此外,
失足会导致对维护工人的伤害。
注意:以下零件会发热。如果维护工人需要接触发热的零件,需要佩戴放热手套或者用保护
性的工具:
--伺服马达
-- 控制单元内部
注意:当更换了一个零件后,所有的螺钉和其他相关的组成部分应该放回各自原来的地方。
必须做仔细的检查,确保没有组件丢失或者未被安装。
注意:在对气动系统的维护进行前,应该关闭供压系统并且排放管道内的气体使气压降至零。

剩余901页未读,继续阅读
2020-02-05 上传
2022-07-10 上传
2022-07-03 上传
2022-06-30 上传
2018-12-18 上传
2022-06-30 上传
2021-09-11 上传

iamy0u
- 粉丝: 5
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- Fisher Iris Setosa数据的主成分分析及可视化- Matlab实现
- 深入理解JavaScript类与面向对象编程
- Argspect-0.0.1版本Python包发布与使用说明
- OpenNetAdmin v09.07.15 PHP项目源码下载
- 掌握Node.js: 构建高性能Web服务器与应用程序
- Matlab矢量绘图工具:polarG函数使用详解
- 实现Vue.js中PDF文件的签名显示功能
- 开源项目PSPSolver:资源约束调度问题求解器库
- 探索vwru系统:大众的虚拟现实招聘平台
- 深入理解cJSON:案例与源文件解析
- 多边形扩展算法在MATLAB中的应用与实现
- 用React类组件创建迷你待办事项列表指南
- Python库setuptools-58.5.3助力高效开发
- fmfiles工具:在MATLAB中查找丢失文件并列出错误
- 老枪二级域名系统PHP源码简易版发布
- 探索DOSGUI开源库:C/C++图形界面开发新篇章
