




飞思卡尔智能车制作:舵机控制与优化
需积分: 9 157 浏览量
更新于2024-10-08
1
收藏 64KB DOC 举报
"飞思卡尔智能车制作中的舵机控制技术及其重要性"
飞思卡尔智能车竞赛中,舵机部分扮演着至关重要的角色。舵机,作为转向执行机构,其性能直接影响到智能车的行驶稳定性和速度。舵机控制的关键在于PID算法的优化,这是确保舵机精确、快速响应的基础。PID(比例-积分-微分)算法是一种经典的控制策略,通过调整PID参数,可以使舵机在最短时间内达到预设的角度,从而提高整体系统的响应速度。
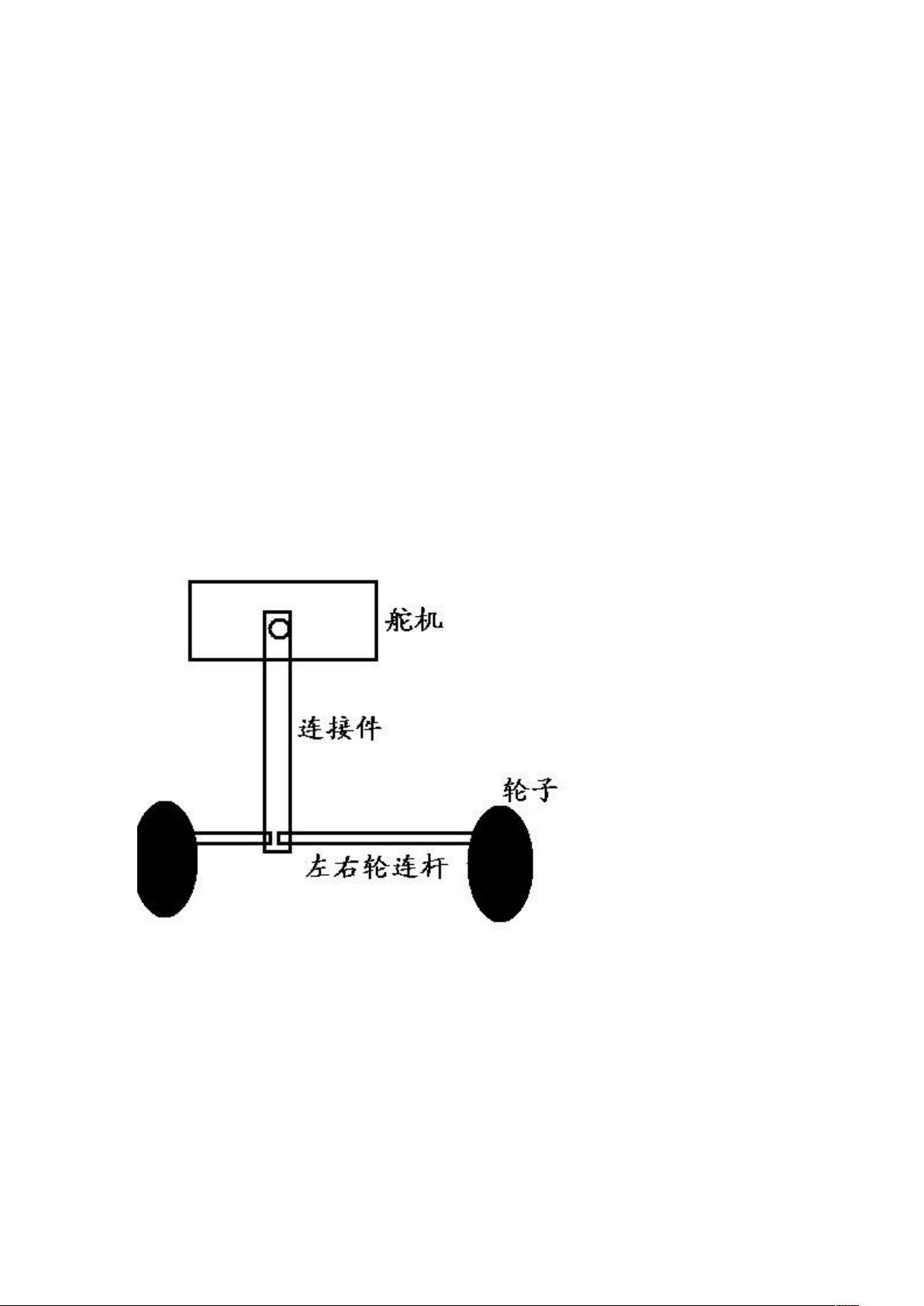
在机械设计方面,舵机连接件的长度调整是提升响应速度的一个巧妙方法。较长的连接件可以减少舵机实际需要转动的角度,从而缩短完成转向的时间。例如,如果舵机转动10度需要2毫秒,通过延长连接件,只需转动5度就能达到相同效果,时间则减半至1毫秒。实践中,通常会尝试将连接件长度增长0.5倍至2倍来优化这一性能。
在2009年的比赛中,有些队伍尝试使用两个独立的舵机控制两个前轮,以实现更精细的转向控制,但这种设计并未被当年的规则允许。这提示我们在设计时要考虑竞赛规则的限制。
软件层面,舵机控制与传感器布局紧密相关。传感器通常按照中心密集、两侧稀疏的方式布置,以便在车辆转弯时能更准确地检测赛道边缘。当车辆偏离轨道时,传感器数据的变化会指导舵机做出相应的调整。常见的方法包括使用查表法,根据传感器状态直接查找对应的舵机转角,或者计算传感器的中心点来确定转向角度。
查表法简单易行,具有一定的滤波效果,可以避免因个别传感器错误读数导致的不必要转向。另一种方法是根据实时计算的传感器中心点,动态调整舵机角度,使车辆始终保持在赛道中央。这两种方法各有优势,可以根据具体算法和系统需求选择适合的控制策略。
飞思卡尔智能车的舵机部分不仅涉及到硬件的选型和优化,还包括软件控制策略的设计,尤其是PID算法的调校和传感器数据的处理。这些细节对于提升智能车的性能至关重要,也是参赛团队在准备过程中需要重点研究和实践的领域。
飞思卡尔智能车制作全过程---舵机篇(转贴)
2009-05-02 19:43
智能车的制作中,看经验来说,舵机的控制是个关键.相比驱动电机的调速,舵机的
控制对于智能车的整体速度来说要重要的多.
PID 算法是个经典的算法,一定要将舵机的 PID 调好,这样来说即使不进行
驱动电机的调速(匀速),也能跑出一个很好的成绩.
机械方面:
从我们的测试上来看,舵机的力矩比较大,完全足以驱动前轮的转向.因此
舵机的相应速度就成了关键.怎么增加舵机的响应速度呢?更改舵机的电路?不
行,组委会不允许.一个非常有效的办法是更改舵机连接件的长度.我们来看看示
意图:
从上图我们能看到,当舵机转动时,左右轮子就发生偏转.很明显,连接件长
度增加,就会使舵机转动更小的转角而达到同样的效果.舵机的特点是转动一定
的角度需要一定的时间.不如说(只是比喻,没有数据),舵机转动 10 度需要 2ms,
那么要使轮子转动同样的角度,增长连接件后就只需要转动 5 度,那么时间是
1ms,就能反应更快了.据经验,这个舵机的连接件还有必要修改.大约增长 0.5 倍
~2 倍.
在今年中,有人使用了两个舵机分别控制两个轮子.想法很好.但今年不允许
下载后可阅读完整内容,剩余3页未读,立即下载
257 浏览量
495 浏览量
1538 浏览量
293 浏览量
579 浏览量
171 浏览量
125 浏览量
289 浏览量

libin5155
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 易语言实现163邮箱自动填表注册流程
- AVR Mega128单片机LCD240128驱动程序开发指南
- Geostar3.2软件操作手册:矢量数据处理与空间分析
- 3D卡通汽车尾气动画特效实现
- C# WinForm中英文自定义控件实现多语言转换
- 打造炫目图片幻灯片效果:javascript与css结合应用
- FlexPaper源码破解与个性化定制技术详解
- cse161: 多数据库连接客户端工具解析
- 易语言实现的Alexa数据查询系统解析
- MFC DLL动态链接库实现基础算术操作教程
- 深入了解GDI+在VC++中的应用与.net版本集成
- DarkReddit-crx:为Reddit打造的深色主题扩展插件
- 腾讯云乐固最后本地版发布,即将告别支持
- vrPlus软件:跨VR硬件格式输出解决方案
- VB实现验证码生成与识别技术细节解析
- 实现银行卡号每四位自动添加空格的输入监听方法






















