扩展卡尔曼滤波在机动目标跟踪中的仿真分析
本资源是一份关于统计信号处理的作业,涉及机动目标跟踪的数学建模与卡尔曼滤波算法应用。作业主题围绕机动目标在三个阶段(初始匀速直线、匀速圆周运动和返回匀速直线)下的运动轨迹分析,以及采用扩展卡尔曼滤波进行估计和跟踪。
首先,机动目标在运动过程中,其线速度v保持不变,轨迹切线与横轴正向夹角随时间变化。初始阶段和返回阶段,这个角度分别为0和[pic]。在圆周运动阶段,角速度[pic]从0均匀增加至[pic]。通过这些参数,可以推导出状态变量,如角位置、角速度等,并建立状态方程:
状态方程表示为:
1. [pic]的状态更新公式
2. [pic]的状态转移矩阵,由于角速度和速度的关系,状态转换矩阵为[pic]
3. 驱动噪声的描述,假设噪声不相关,[pic]和[pic]的方差分别为[pic]和[pic]
观测矢量由目标的位置和速度组成,观测矩阵[pic],噪声分布也考虑了观测值之间的独立性和方差,即[pic]和[pic]的方差分别为[pic]和[pic]。
最后,扩展卡尔曼滤波方程被总结出来,包括预测步骤、更新步骤以及系统噪声模型。滤波器初始化设定为:初始位置[-20000;0],有偏离可能,速度v=300m/s,角速度[pic]=0,加速度a=0,驱动噪声方差取[pic]=30和[pic]=2。
仿真部分使用MATLAB编程,通过蒙特卡洛方法模拟10次跟踪滤波过程。结果显示,随着滤波器增益M的增大(如M=10和M=1),滤波性能提升,尤其是在目标转弯时表现更好。滤波轨迹、滤波均值轨迹、X和Y方向的滤波估计误差及其标准差都通过图形展示,如图2、图3和图4。附录提供了MATLAB源代码,用于实现整个滤波过程的模拟计算。
这是一份结合理论与实践的统计信号处理作业,展示了机动目标跟踪中的数学建模、卡尔曼滤波算法的实际应用,以及如何通过计算机仿真评估滤波效果。对于学习和研究统计信号处理、雷达目标跟踪或者卡尔曼滤波的学生来说,这份作业具有较高的参考价值。
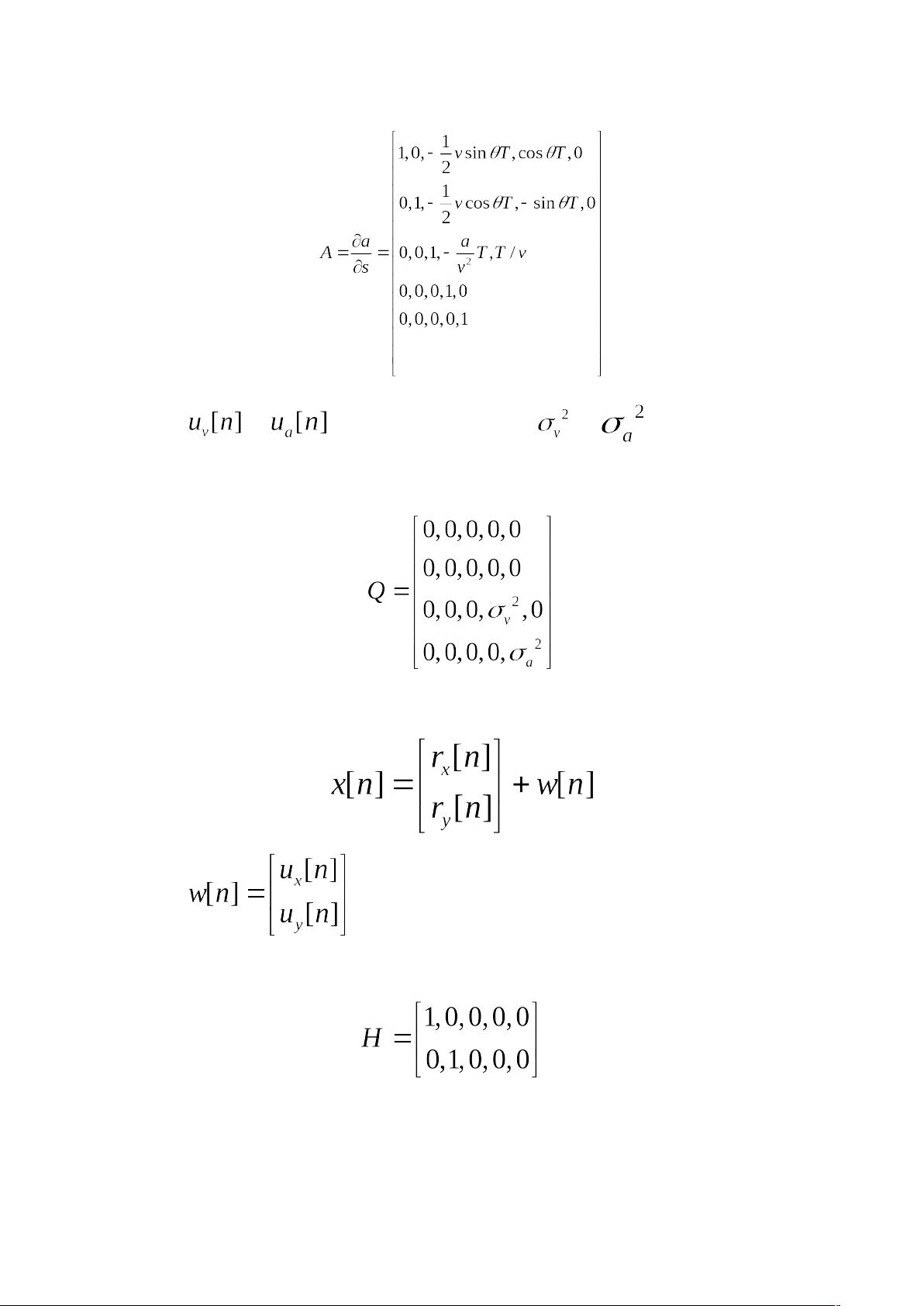
假设 和 不相关,方差分别为 、 ,因此得驱动
噪声
观测矢量
其中
所以观测矩阵
,
剩余13页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
893 浏览量
235 浏览量
2024-10-13 上传
2013-05-22 上传
205 浏览量
2021-10-04 上传

chaojidadazhu123
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- PlantManager
- wlab-pro.github.io
- TaskToobig
- django-ra-erp:一个基于Django的框架,用于创建各种业务解决方案,并配有报告引擎和响应式仪表板
- PVsyst.v5.03.Multilingual.rar
- linphoneDoc.rar
- seckill:秒杀系统
- 50个动画图标 .aep .gif素材下载
- 易语言libcurl库7.73.0板源码+demo
- TaskItalic
- azure-k3s-cluster:使用k3s.io部署轻量级Kubernetes群集的Azure模板
- java邮件发送demo.rar
- More.Effective.C.rar
- caleydo.github.io:Caleydo网站
- handle-write-xx:手写***
- TaskDouble
