机器人系统架构设计:关键要素与策略
61 浏览量
更新于2024-08-28
收藏 764KB PDF 举报
"解析:机器人系统架构的特殊技巧与设计"
在构建机器人系统时,系统架构的设计至关重要,因为它决定了机器人的功能实现方式、模块间的通信机制以及整体系统的可扩展性和稳定性。一个理想的机器人编程流程,首先需要进行系统架构设计,接着是具体功能的算法实现,最后是编码与集成。本文主要关注系统架构这一阶段。
1. 系统架构设计
- 组件化与模块化:将复杂的机器人功能分解为独立的组件或模块,每个组件负责特定的任务,如感知、决策、执行等。这有助于提高代码的可读性、可维护性和可复用性。
- 关系与接口定义:明确组件之间的交互方式,定义通信协议和数据格式,确保不同模块间能有效协作。
- 原则与指导:制定架构设计的指导原则,如松耦合、高内聚,确保系统具有良好的可扩展性和适应性。
2. 架构类型与选择
- 控制回路:适用于实时性强、响应速度要求高的控制系统,如运动控制。
- 分层架构:通过层次化的结构,将复杂系统分解为多个层次,每个层次处理特定级别的抽象,易于理解和调试。
- 隐式调用:组件间通过事件驱动的方式进行交互,适用于需要灵活响应环境变化的场景。
- 黑板系统:多个模块可以同时访问和更新共享的数据结构(黑板),用于解决不确定性和复杂决策问题。
3. ROS(Robot Operating System)架构
- ROS以其节点(Node)的概念,为机器人系统提供了一个分布式计算框架,支持多传感器融合、任务调度和信息传递。
- ROS的优势在于其丰富的库和工具,以及强大的社区支持,但可能不适合资源有限的小型嵌入式设备。
4. 灵活性与安全性
- 机器人架构应具备应对不确定性和危险的能力,比如通过概率推理和避障算法来应对环境的不确定性。
- 安全性是机器人设计的关键,需要考虑潜在的故障模式和安全防护措施,确保在异常情况下不会对人员或环境造成伤害。
5. 持续发展与创新
- 随着技术的发展,新的架构理念和平台不断涌现,如基于微服务的架构,能够更灵活地部署和更新机器人功能。
- 不断评估和学习最新的架构设计趋势,如边缘计算、云计算与物联网的融合,以优化机器人系统的性能和效率。
机器人系统架构设计是一门综合了软件工程、控制理论、人工智能等多个领域的学问,需要根据具体的应用场景和需求,选择合适的架构模型,并不断优化以适应技术的发展和应用的变化。理解并掌握这些特殊技巧,对于构建高效、可靠的机器人系统至关重要。
解析:机器人系统架构有哪些特殊技巧?解析:机器人系统架构有哪些特殊技巧?
编辑推荐编辑推荐:
本文主要讲解了机器人编程涉及控制系统的设计与实现,包括环境感知、交互、移
动及行为的控制。
本文来自雷锋网,由火龙果软件Anna编辑、推荐。
一个理想的机器人编程过程包括(假定硬件已经一切就绪):
1.系统架构设计
2.具体功能的算法实现
3.编码与集成
由于笔者所从事工作性质,主要集中在:1.系统设计和2.算法的研究上,3.coding的机会并不是很多。第二个原因是:如果1、
2工作完成后,3的工作其实和机器人本身并不大,计算机专业恐怕会做的更好。因此本文主要就1给出一些总结和建议。另
外,由于所研究的算法过(wu)于(fa)先(ying)进(yong),通常会在专业的学术期刊上发表,在此也不做过多讨论。
一、机器人系统架构
“架构可定义为组件的结构及它们之间的关系,以及规范其设计和后续进化的原则和指南。简言之,架构是构造与集成软件密
集型系统的深层次设计。”
系统架构也可称其为如何实施解决方案的一个策略性设计(例如基于组件的工程标准、安全)和解决方案做什么的功能性设计
(如算法、设计模式、底层实现)。
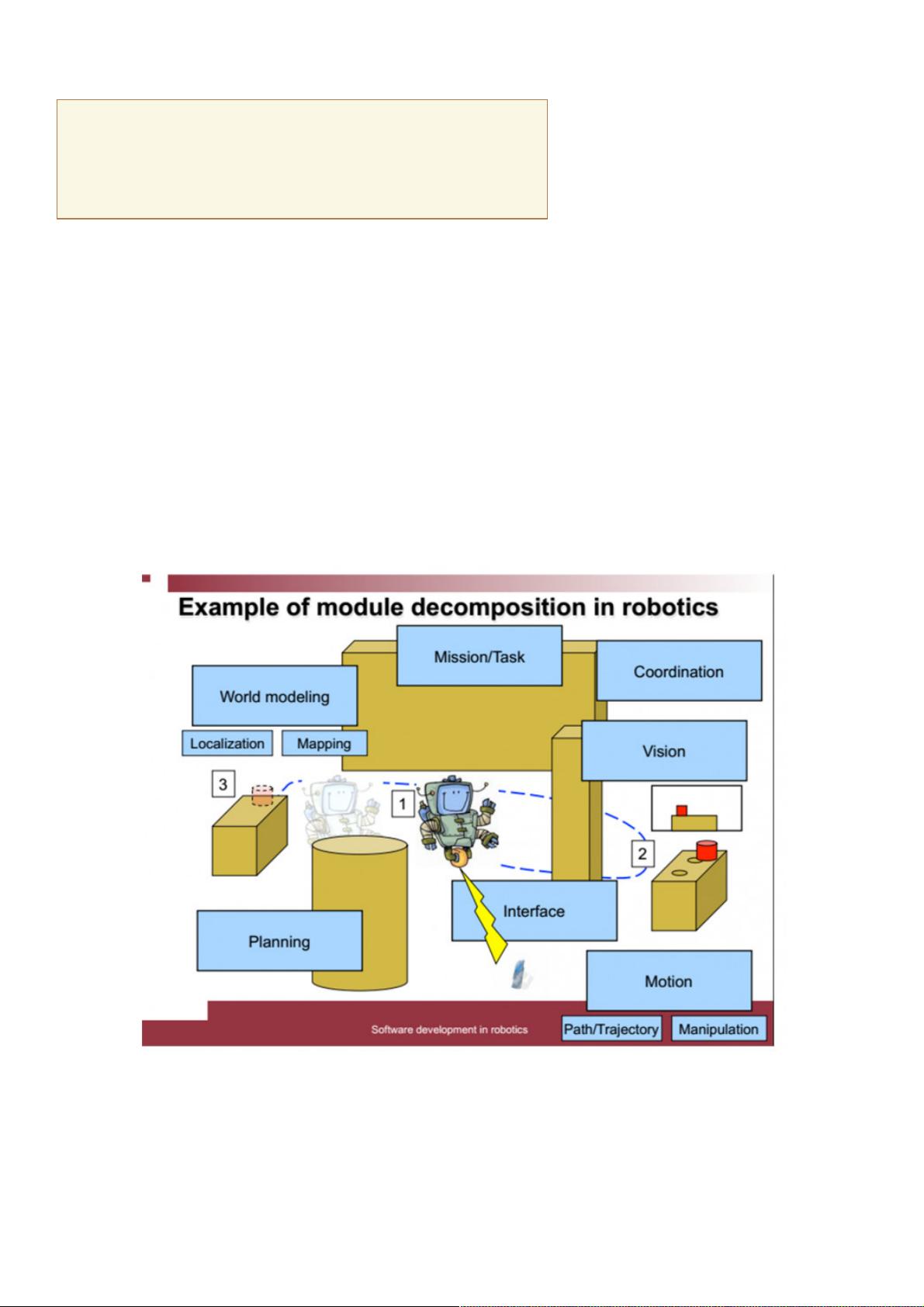
图1 机器人功能分解
另外,软件工程的基本要求包括模块化、代码可复用、功能可共享。使用通用的框架,有利于分解开发任务及代码移植。机器
人软件同样遵从软件工程的一般规律。说白了,架构就是你如何把机器人的功能打散,再如何把代码组织起来。一个清晰的与
项目相匹配的架构直接决定了你的开发效率甚至最终功能的成败。
从人类第一台可编程的机器人开发伊始,架构问题就与之相伴而生。早在1996年,Garlan 和 Shaw在《软件架构:一门新兴
学科的展望》就总结了移动机器人的基本设计需求, 如:(1) 慎思规划和反应式行为;(2)容许不确定性;(3)考虑危
险;(4)灵活性强。针对这些要求,他们评估了四种用于移动机器人的架构,包括控制回路(control loop)、分层
(layers)、隐式调用(implicit invocation)、黑板(blackboard)。经过了几十年的实践,一些架构被逐渐淘汰,一些架构
逐渐被完善起来。
下载后可阅读完整内容,剩余6页未读,立即下载
2021-08-12 上传
2021-10-24 上传
2023-06-01 上传
2023-06-09 上传
2023-09-16 上传
2023-06-01 上传
2023-03-31 上传
2023-03-29 上传
2023-06-01 上传

weixin_38682242
- 粉丝: 5
- 资源: 991
 我的内容管理
展开
我的内容管理
展开







最新资源
- 磁性吸附笔筒设计创新,行业文档精选
- Java Swing实现的俄罗斯方块游戏代码分享
- 骨折生长的二维与三维模型比较分析
- 水彩花卉与羽毛无缝背景矢量素材
- 设计一种高效的袋料分离装置
- 探索4.20图包.zip的奥秘
- RabbitMQ 3.7.x延时消息交换插件安装与操作指南
- 解决NLTK下载停用词失败的问题
- 多系统平台的并行处理技术研究
- Jekyll项目实战:网页设计作业的入门练习
- discord.js v13按钮分页包实现教程与应用
- SpringBoot与Uniapp结合开发短视频APP实战教程
- Tensorflow学习笔记深度解析:人工智能实践指南
- 无服务器部署管理器:防止错误部署AWS帐户
- 医疗图标矢量素材合集:扁平风格16图标(PNG/EPS/PSD)
- 人工智能基础课程汇报PPT模板下载
