"工业机器人远程控制系统设计——嵌入式伺服控制器硬件与软件设计"
版权申诉
41 浏览量
更新于2024-02-27
收藏 798KB DOC 举报
本文是一篇工学学士论文,题为《工业机器人遥操作控制系统设计——嵌入式伺服控制器设计》。随着科技的发展,机器人在工业和生活中的应用越来越广泛。本课题旨在设计工业机器人的遥操作控制系统,主要包括嵌入式伺服控制器的设计。通过处理上位机命令和反馈信号,实现对工业机器人的有线遥控及运动轨迹的示教再现。该设计主要由硬件设计和软件设计两方面组成。
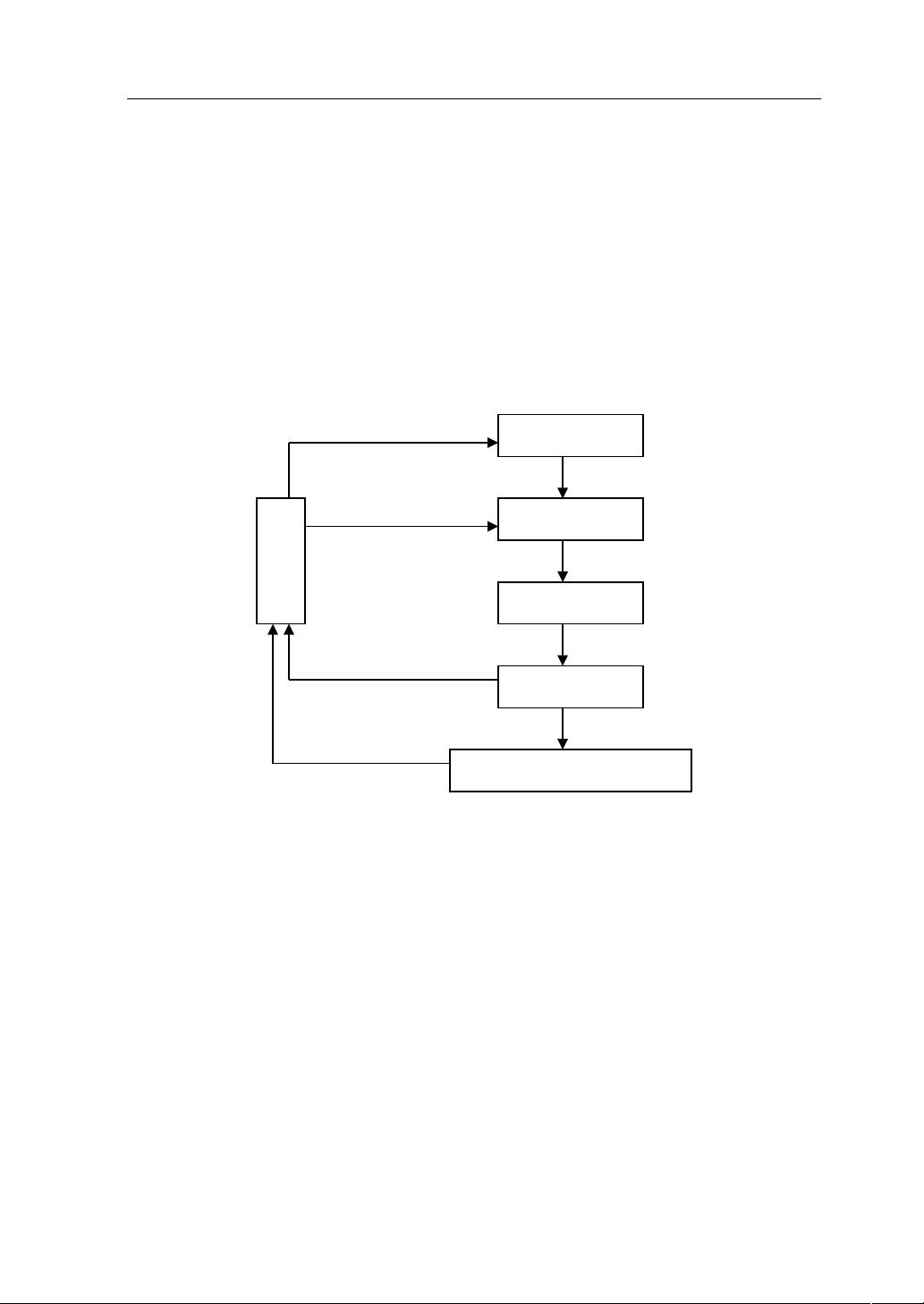
在硬件方面,本设计采用了 TI 公司的 MSP430 系列超低功耗混合信号控制器 MSP430F449作为微处理器,采用 CAN 总线与上位机进行通讯,通过隔离放大信号实现对驱动器的控制并采集光电编码器反馈的信号。在软件部分,主要包括主程序、总线通讯程序和自动控制程序等。整体设计综合了多方面的专业知识,利用嵌入式系统提升了机器人的控制性能,通过硬件实现控制算法,同时完成任务的合理调度、实时控制和通信功能,从而促进了机器人和工业的全面接轨。
关键词:工业机器人;控制器;嵌入式
Abstract
This bachelor's thesis focuses on the design of an industrial robot's remote control system, specifically the design of an embedded servo controller. With the rapid development of technology, robots are increasingly being applied in various industrial and domestic settings. This study aims to develop a remote control system for industrial robots, with a focus on the design of an embedded servo controller. The system is designed to process commands from the upper computer and feedback signals to achieve wired remote control and reproduction of motion trajectories.
The design consists of two main components: hardware and software. In terms of hardware, the system employs the MSP430F449, a low-power mixed-signal controller from TI, as the microprocessor. It utilizes the CAN bus to communicate with the upper computer, and uses isolation amplification to control the driver and collect feedback signals from the photoelectric encoder. The software includes the main program, bus communication program, and automatic control program, among others. The comprehensive design integrates various professional knowledge and utilizes embedded systems to improve the control performance of robots. It implements control algorithms through hardware, while also achieving reasonable task scheduling, real-time control, and communication functions, thus promoting the comprehensive integration of robots and industry.
Key words: industrial robot; controller; embedded.

工学学士论文 绪论
点,所以机器人技术得以迅猛发展。
日本机器人的发展经过了 20 世纪 60 年代的摇篮期,70 年代的实用化
时期以及 80 年代的普及、提高期三个基本阶段。在 1967 年,日本东京机
械贸易公司首次从美国 AMF 公司引进 Versatran 机器人。1968 年,日本川
崎 重 工 业 公 司 与 美 国 Unimation 公 司 缔 结 国 际 技 术 合 作 协 议 , 引 进
Unimation 机器人。1970 年,日本机器人实现国产化。从此,日本进入了
开发和应用机器人技术时期。几年后,美国反而要从日本进口机器人
1983 年,美国从日本进口的机器人占美国总数的 78%。
1.3.2 我国工业机器人的发展状况
我国工业机器人起步于 20 世纪 70 年代初,经过 30 多年的发展,90
年代进入了适用化期,先后研制出了点焊、弧焊、装配、喷漆、切割、搬
运、包装、码垛等各种用途的工业机器人,并实现了一批机器人应用工程 ,
形成了一批机器人产业化基地,为我国机器人产业的腾飞奠定了基础。
目前我国机器人研究的主要内容如下:
1)示教再现型工业机器人产业化技术研究
这些研究主要包括:关节式、侧喷式、顶喷式、龙门式喷涂机器人产
品的标准化,通用化、模块化、系列化设计;柔性仿形喷涂机器人产品的
标准化、通用化、模块化、系列化设计;弧焊机器人用激光视觉焊缝跟踪
装置的开发;焊接机器人的离线示教编程及工作站系统动态仿真;电子行
业用装配机器人产品标准化、通用化、模块化、系列化设计;批量生产机
器人所需的专用制造、装配、测试设备和工具的研究开发。
2)智能机器人开发研究
这些研究主要包括:遥控加局部自主系统构成和控制策略研究;智能
移动机器人的导航和定位技术研究;面向遥控机器人的虚拟现实系统;人
机交互环境建模系统;基于计算机屏幕的多机器人遥控技术。
7

剩余63页未读,继续阅读
2022-06-30 上传
2023-05-25 上传
2023-03-09 上传
2023-05-19 上传
2023-03-29 上传
2023-05-19 上传
2023-10-05 上传

omyligaga
- 粉丝: 73
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
