Dijkstra算法详解与C语言实现
"这篇文档详细介绍了Dijkstra算法的原理,并提供了相关的代码示例。Dijkstra算法是一种用于寻找图中两点间最短路径的算法,由荷兰计算机科学家艾兹格·迪科斯彻提出。该算法适用于加权有向图或无向图,尤其在寻找最短路径时非常有效。"
在Dijkstra算法中,我们首先设置一个源点,然后逐步扩展最短路径到图中的其他点。算法的核心是维护一个优先队列(通常是基于最小堆),其中包含当前已知最短路径的顶点。每次从队列中取出具有最小路径长度的顶点,然后更新与其相邻且尚未加入最短路径集合的顶点的路径。
以下是Dijkstra算法的执行步骤:
1. 初始化:为所有顶点设置无限大的距离(除了源点设为0),并将它们放入优先队列中。
2. 取出优先队列中距离最小的顶点(源点)。
3. 更新与该顶点相邻的其他顶点的距离,如果通过当前顶点到达这些顶点的路径比已知的路径更短,则更新距离。
4. 将更新后的顶点放入优先队列中。
5. 重复步骤2-4,直到优先队列为空或者目标顶点已被处理。
6. 最终,所有顶点的最短路径信息将被计算出来。
在提供的代码示例中,`Dijkstra.c`包含了算法的实现。`struct Point`定义了图中的顶点,包含顶点标识和指向相邻顶点的链接;`struct Link`表示边,包括顶点信息和边的权重;`struct Table`是工作表,存储每个顶点的最短路径信息。`Dijkstra()`函数是算法的主体,它接收图的顶点结构和工作表作为参数,返回最短路径的计算结果。`FindSmallest()`函数用于在工作表中找到当前最短路径的顶点。
输入和输出格式按照特定的约定,例如,输入时需要按编号指定算法的起始点,输出则会显示从起点到各个顶点的最短路径。`CreateTable()`用于创建工作表,`PrintTable()`和`PrintPath()`分别用于打印工作表和最短路径。
这个文档提供了一个完整的Dijkstra算法实现,适合初学者理解和学习如何在实际编程中应用这一算法。
Dijkstra 算法原理详细讲解
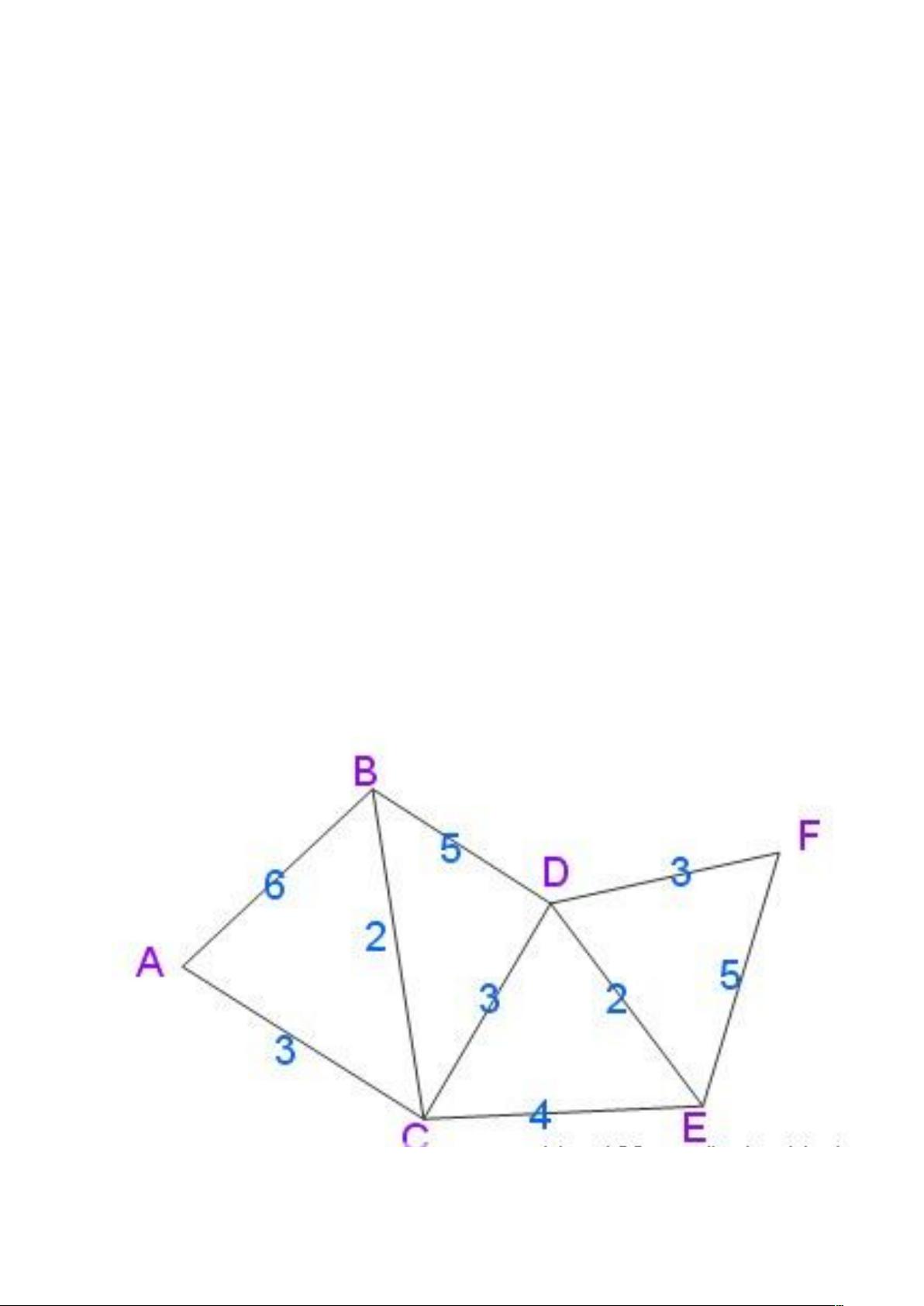
如下图,设 A 为源点,求 A 到其他各顶点(B、C、D、E、F)的最短路径。
线上所标注为相邻线段之间的距离,即权值。(注:此图为随意所画,其相邻
顶点间的距离与图中的目视长度不能一一对等)
算法执行步骤如下表:
下载后可阅读完整内容,剩余8页未读,立即下载
2009-10-28 上传
2021-10-11 上传
2021-10-05 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

btq123
- 粉丝: 3
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- Variational-AutoEncoder-For-Novelty-Detection:使用Keras实现的变体自动编码器,用于对EMNIST-Letters数据集执行新颖性检测
- js透明按钮图片滑动切换焦点图
- trabajo-2bim-001-iaortiz:GitHub Classroom创建的trabajo-2bim-001-iaortiz
- coinhsl依赖文件
- 行业资料-电子功用-具有对数自保护功能的高压总线放电电路的说明分析.rar
- 【WordPress插件】2022年最新版完整功能demo+插件.zip
- 【推荐】海康威视-综合安防系统设计方案-HIK-201707V2.1
- CSP-J组复赛第二题 公路附件
- T.O.P Big Bang Wallpaper for New Tab-crx插件
- tutorials:来自SciPy和PyData会议的可执行教程的集合
- 行业资料-电子功用-具有对正导向件的电连接器的说明分析.rar
- 异步电机仿真模型.7z
- 彩绘快餐店菜单设计矢量
- IOS应用源码Demo-日历组件-毕设学习.zip
- 基于java-136_基于Java的酒店管理系统的设计与实现-源码.zip
- DownloadFilesWithThreadPoolExecutor
