4步掌握Matlab模糊控制工具箱设计实战
Matlab模糊控制工具箱教程指南
Matlab模糊控制工具箱是Matlab软件中的一个重要功能模块,用于简化模糊控制器的设计过程。该工具箱通过提供直观的界面和预设的算法,帮助用户避免繁琐的模糊化、推理和反模糊化操作,快速构建和调整控制器。以下四步指导将帮助你入门使用Matlab模糊控制工具箱:
1. **确定控制器结构**:
- 在Matlab命令窗口输入`fuzzy`命令,打开模糊逻辑编辑器。
- 设计基本的二维控制结构,输入为误差(e)和误差变化(ec),输出为控制量(u)。在这个阶段,所有变量都是精确量,需要通过`AddVariable`功能转化为模糊输入和输出变量E, EC, 和U。
2. **模糊化输入和输出**:
- 定义模糊子集,如{NB, NM, NS, ZO, PS, PM, PB},表示语言值的区间。
- 设置输入和输出变量的论域,如误差E, EC, 控制量U的取值范围{-3, -2, ..., 3}。
- 使用`MemberFunctionEdit`窗口创建或修改隶属函数,如对E设置7个隶属函数,定义论域和调整其类型和语言变量。
3. **模糊推理决策算法设计**:
- 基于专家经验和系统特性,设计模糊控制规则。对于二维结构,通常会有49条规则,每条规则基于输入模糊集。
- 创建模糊规则矩阵,并利用Matlab模糊工具箱的推理算法,根据当前的模糊输入计算出模糊输出量。
4. **输出解模糊**:
- 模糊控制器输出的是模糊量,需要通过解模糊过程将其转换为精确的控制信号。这一步可能涉及到选择合适的解模糊函数,如中心平均法或最大隶属度法,以便得到实际的控制输出。
通过遵循以上四个步骤,你将能够熟练地使用Matlab模糊控制工具箱设计和优化你的控制系统,极大地提高控制器设计的效率和灵活性。记得,实际应用中可能需要根据具体系统的特性和需求调整参数和规则,以达到最佳控制效果。
4 步教你学会使用 matlab 模糊控制工具箱(2008-09-20 23:42:02)
Matlab 模糊控制工具箱为模糊控制器的设计提供了一种非常便捷的途径,
通过它我们不需要进行复杂的模糊化、模糊推理及反模糊化运算,只需要设定
相应参数,就可以很快得到我们所需要的控制器,而且修改也非常方便。下面
将根据模糊控制器设计步骤,一步步利用 Matlab 工具箱设计模糊控制器。首
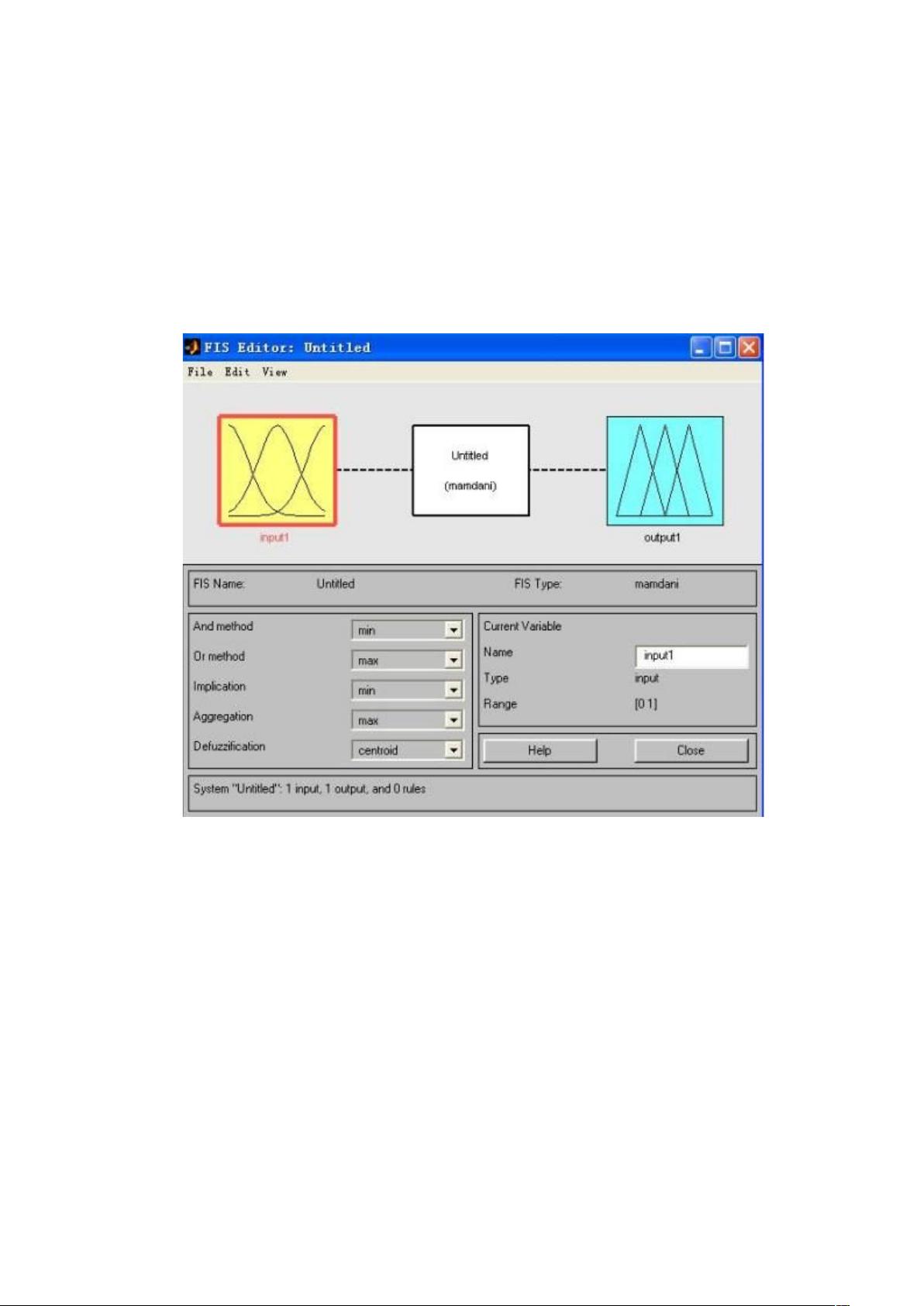
先我们在 Matlab 的命令窗口(command window)中输入 fuzzy,回车就
会出来这样一个窗口。
下面我们都是在这样一个窗口中进行模糊控制器的设计。
1.确定模糊控制器结构:即根据具体的系统确定输入、输出量。
这里我们可以选取标准的二维控制结构,即输入为误差 e 和误差变化 ec,
输出为控制量 u。注意这里的变量还都是精确量。相应的模糊量为 E,EC 和
U,我们可以选择增加输入(Add Variable)来实现双入单出控制结构。
下载后可阅读完整内容,剩余4页未读,立即下载
784 浏览量
2022-11-27 上传
2022-11-27 上传
164 浏览量
169 浏览量
1304 浏览量
1814 浏览量

happyhary
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#实现自定义尺寸条形码和二维码生成工具
- Bootthink多系统引导程序成功安装经验分享
- 朗读女中文朗读器,智能语音朗读体验
- Jupyter Notebook项目培训教程
- JDK8无限强度权限策略文件8下载指南
- Navicat for MySQL工具压缩包介绍
- Spring和Quartz集成教程:定时任务解决方案
- 2013百度百科史记全屏效果的fullPage实现
- MATLAB开发电磁转矩电机瞬态响应研究
- 安卓系统短信问题解决方案:使用BlurEmailEngine修复
- 不同版本Android系统的Xposed框架安装指南
- JavaScript项目实验:模拟骰子与颜色转换器
- 封装高效滑动Tab动画技术解析
- 粒子群优化算法在Matlab中的开发与应用
- 网页图书翻页效果实现与turnjs4插件应用
- JSW: 一种新型的JavaScript语法,支持Coffeescript风格
