MATLAB中的PID控制器设计与Ziegler-Nichols整定
需积分: 50 123 浏览量
更新于2024-09-16
5
收藏 234KB DOC 举报
"这篇文档是关于使用MATLAB进行PID控制器设计的实验报告,作者通过介绍PID控制的基本原理,Ziegler-Nichols参数整定方法,并展示了如何在MATLAB环境下进行PID控制器的设计与仿真。"
文章详细内容:
PID控制器是一种广泛应用的反馈控制策略,其优势在于不需要精确的系统模型,只需通过比例、积分和微分作用来调整控制信号,从而有效地减少稳态误差并提高系统性能。PID控制器的三个主要参数——比例系数(Kp)、积分系数(Ti)和微分系数(Td)的选择对系统性能有直接影响。
在PID控制中,控制器对误差信号进行比例运算可以迅速响应变化,积分作用能消除稳态误差,而微分作用则有助于改善系统的动态响应,但微分项可能对系统稳定性产生负面影响,特别是对高频干扰敏感。
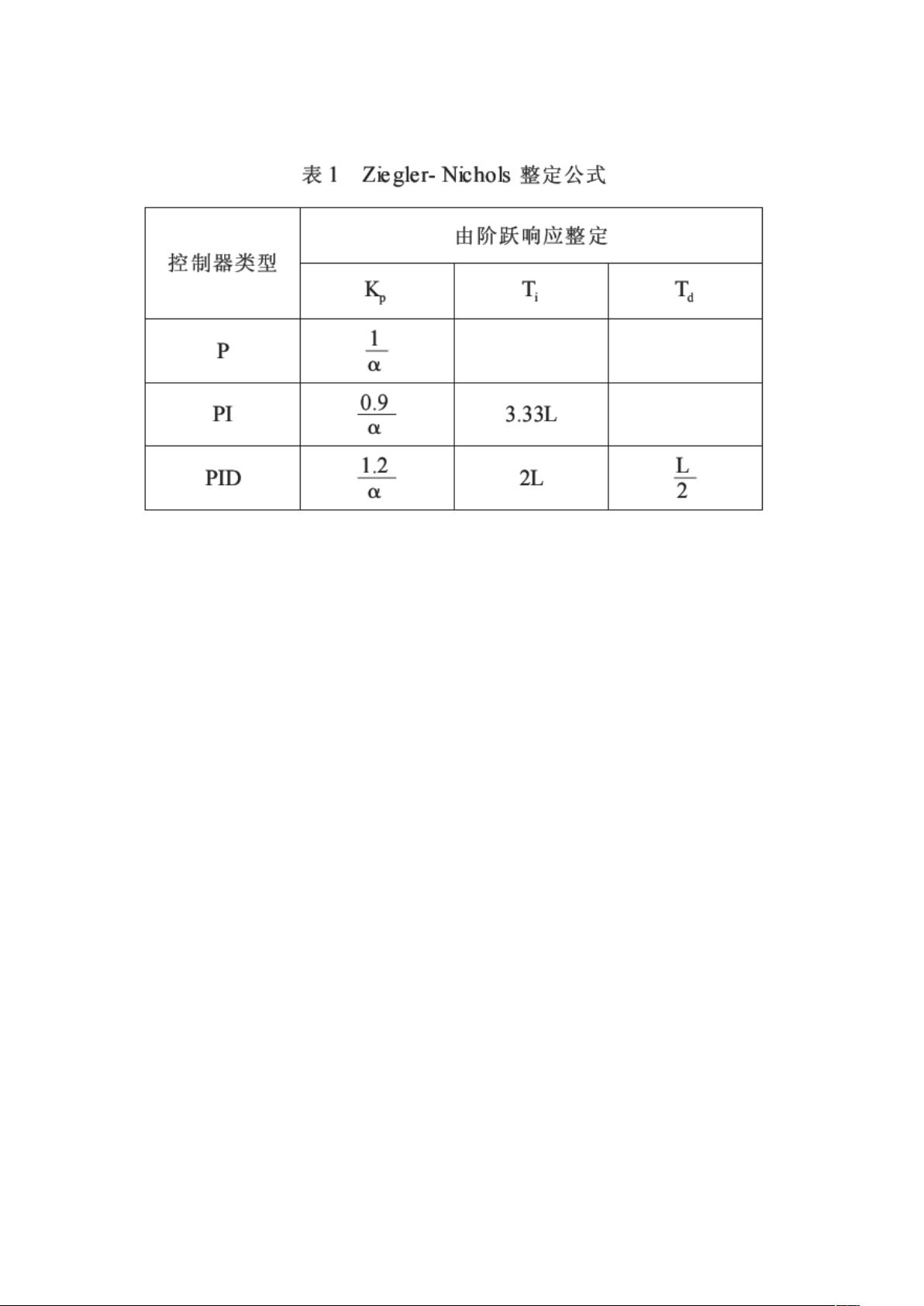
Ziegler-Nichols参数整定法是一种常用的PID控制器参数设定方法,尤其适用于一阶或接近一阶的对象模型。该方法通过对象的阶跃响应曲线来确定控制器参数,比如对象模型的增益K、时间常数T和滞后时间L。在MATLAB中,可以使用`step()`函数获取开环阶跃响应曲线,或者使用`dcgain()`函数直接计算对象模型的直流增益K。
在MATLAB环境下,设计PID控制器通常包括以下步骤:
1. 定义被控对象的模型,这可能是通过实验数据或理论建模得到的。
2. 应用Ziegler-Nichols法则,根据对象模型的参数计算初始的PID控制器参数。
3. 使用MATLAB的Simulink工具箱构建系统模型,包括被控对象和PID控制器。
4. 仿真系统行为,分析控制性能,如超调、上升时间和稳态误差等。
5. 根据仿真结果调整PID参数,迭代优化直至获得满意的控制性能。
通过不断的参数调整和仿真,可以找到最优的PID控制器参数,使得控制系统达到预期的性能指标。MATLAB提供的工具和算法大大简化了这一过程,使得工程师能够快速有效地设计和优化PID控制器,适应各种复杂控制任务的需求。
3. 在 MATLAB 下实现 PID 控制器的设计与仿真
已知被控对象的 K、L 和 T 值后, 我们可以根据 Ziegler — Nichols 整定公式
编写一 个 MATLAB 函数 ziegler_std ( )用以设计 PID 控制器。该函数程序如下:
function [num,den,Kp,Ti,Td,H]=Ziegler_std (key,vars)
Ti=[ ];Td=[ ];H=[ ];
K=vars(1) ;
L=vars(2) ;
T=vars (3);
a=K*L/T;
if key==1
num=1/a; %判断设计 P 控制器
elseif key==2
Kp=0.9/a;Ti=3.33*L; %判断设计 PI 控制器
elseif key==3,
Kp=1.2/a;Ti=2*L;Td=L/2; %判断设计 PID 控制器
end
switch key
case 1
num=Kp;den=1; % P 控制器
case 2
num=Kp*[Ti,1];den=[Ti,0]; % PI 控制器
case 3 % PID 控制器
p0=[Ti*Td,0,0];
p1=[0,Ti,1];p2=[0,0,1];
3
剩余10页未读,继续阅读
2015-08-19 上传
2021-09-10 上传
2022-09-22 上传
2021-10-15 上传
2021-10-10 上传
2022-09-14 上传
2022-09-21 上传

dianfeng88
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







