舵机控制原理与PWM信号详解
需积分: 32 186 浏览量
更新于2024-07-24
收藏 289KB PDF 举报
"舵机控制原理的详尽资料"
舵机控制原理主要涉及到的是脉宽调制(PWM)信号的应用,这是一种在电子控制系统中广泛使用的信号形式,尤其在伺服电机或舵机的控制中。PWM信号通过改变占空比来调整输出功率或设备的工作状态,因此在舵机中,它可以用来精确控制舵机的角度。
1. PWM信号的定义
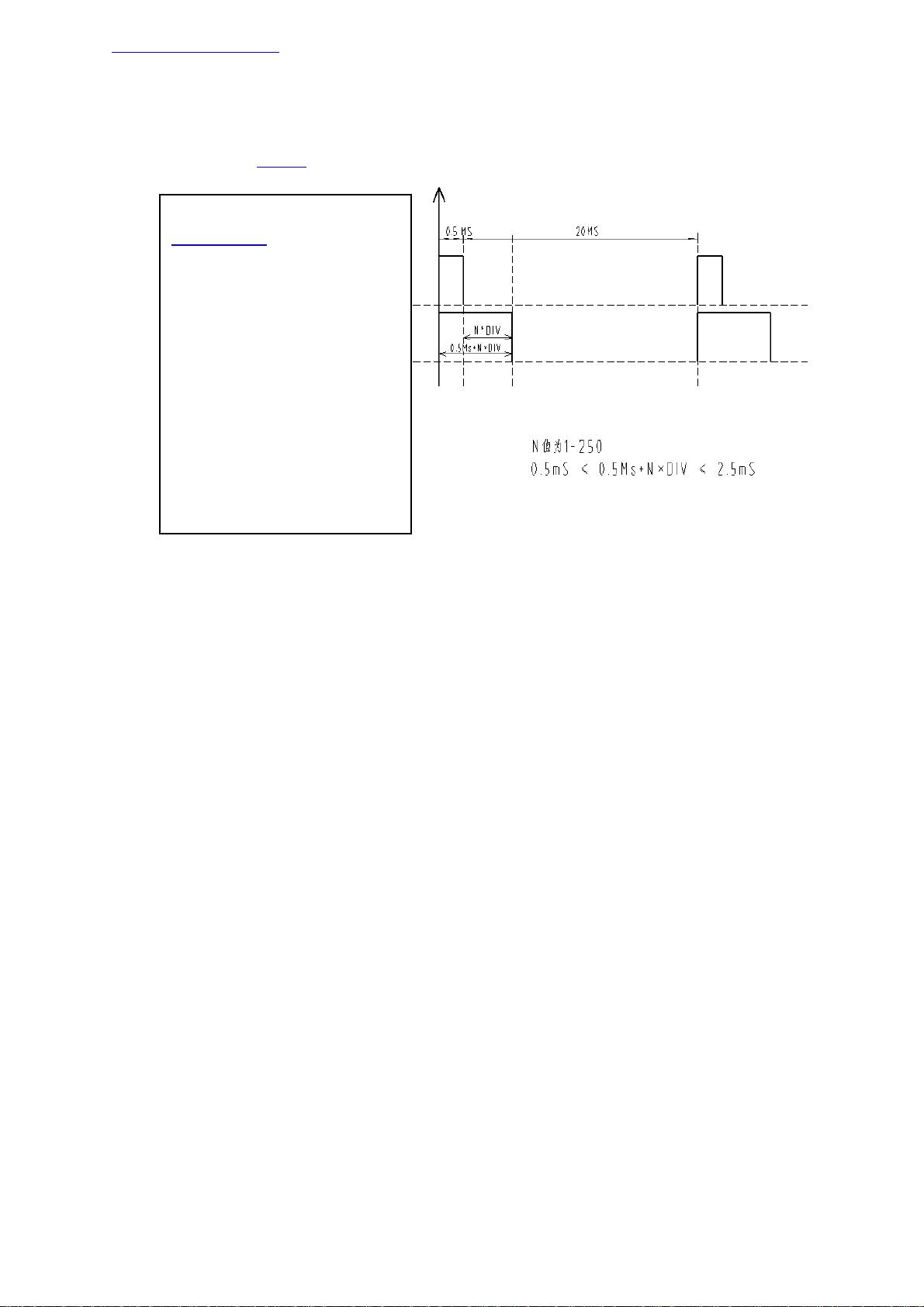
PWM信号是一种模拟信号,由一系列快速开关的周期性脉冲组成。占空比,即脉冲宽度与整个周期的比例,决定了舵机的转动角度。对于舵机,PWM信号的上升沿通常设定为0.5毫秒,而下降沿可以在0.5毫秒到2.5毫秒之间变化。例如,2.5毫秒的脉宽对应于舵机的最大偏转角度,而1.5毫秒则对应于中位或零度角。
2. 舵机的控制精度制定
舵机的控制精度主要取决于PWM信号的分辨率。传统模型行业的标准协议允许的最小角度变化通常为1度左右,但一些新型的数字舵机如北京汉库的HG14-M舵机,由于其内部数字处理能力,可能提供更高的精度。
3. 单舵机拖动及调速算法
- HG14-M舵机的位置控制方法:该舵机可以通过发送特定占空比的PWM信号来控制其转动到指定角度,并且具有位置自锁和位置跟踪功能。
- 目标规划系统:设计舵机的控制系统时,需要考虑其追随特性和动态响应,通过计算ω值(角速度)来实现平滑的调速。
4. 多舵机联动控制
在8舵机联动的情况下,单周期PWM指令算法变得至关重要。每个舵机需要同步接收并执行控制指令,这就需要精确的时间协调和算法设计,如N排序子程序RAM和N差子程序,以确保所有舵机动作的一致性。扫尾问题是指在多舵机系统中,如何避免最后执行的舵机动作导致整个系统的不稳定,这通常需要计算扫尾值来优化控制策略。
5. 扫尾问题
- 提出扫尾的概念:在多舵机联动时,最后一个舵机的动作可能会对已经稳定的位置造成影响。
- 扫尾值的计算:通过计算每个舵机的延迟时间,可以减少这种影响,确保系统整体的稳定运行。
舵机控制技术在机器人、无人机、模型飞机等领域有着广泛应用,理解并掌握舵机的PWM控制原理对于开发高效、精准的控制系统至关重要。同时,随着技术的发展,新的舵机协议和控制算法不断出现,使得舵机的性能和控制方式更加多样化。
2.PWM信号控制精度制定
我们采用的是 8 位
AT89C52CPU
,其数据分辨率为
256,那么经过舵机极限参数实
验,得到应该将其划分为 250 份。
那么 0.5mS---2.5Ms 的宽度
为 2mS = 2000uS。
2000uS÷250=8uS
则:PWM 的控制精度为 8us
我们可以以 8uS 为单位递增
控制舵机转动与定位。
舵机可以转动 185 度,那么
185 度÷250=0.74 度,
则:舵机的控制精度为 0.74 度
图 1-2
1 D
IV
= 8uS ; 250DIV=2mS
时基寄存器内的数值为:(#01H)01 ----(#0FAH)250。
共 185 度,分为 250 个位置,每个位置叫 1DIV。
则:185÷250 = 0.74 度 / DIV
PWM 上升沿函数: 0.5mS + N×DIV
0uS ≤ N×DIV ≤ 2mS
0.5mS ≤ 0.5Ms+N×DIV ≤ 2.5mS
2 / 15
2
电子信息行业导航网站,电子技术工程师的上网主页!
http://www.dianzishijia.com
剩余14页未读,继续阅读
243 浏览量
285 浏览量
4249 浏览量
1194 浏览量
722 浏览量
185 浏览量
457 浏览量
2022-09-20 上传

xxg08
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Windows CMD命令大全:实用操作与工具
- 北京大学ACM训练:算法与数据结构实战
- 提升需求分析技巧:理解冲突与深度沟通实例
- Java聊天室源代码示例与用户登录实现
- Linux一句话技巧大全:陈绪精选问答集锦
- OA办公自动化系统流程详解
- Java编程精华500提示
- JSP数据库编程实战指南:Oracle应用详解
- PCI SPC 2.3:最新规范修订历史与技术细节
- EXT中文教程:入门到进阶指南
- Ext2核心API中文详细解析
- Linux操作系统:入门与常用命令详解
- 中移动条码凭证业务:开启移动支付新时代
- DirectX 9.0 游戏开发基础教程:3D编程入门
- 网格计算新纪元:大规模虚拟组织的基础设施
- iReport实战指南:从入门到精通
