
机器人头部动作识别系统的硬件设计机器人头部动作识别系统的硬件设计
绍了一种用于残疾人的智能交互系统——头部动作识别系统的主体硬件框架,包括头部运动测量单元的设计,
采用了三轴陀螺仪L3G4200D和三轴加速度传感器ADXL345。
导读:
介绍了一种用于残疾人的智能交互系统——头部动作识别系统的主体硬件框架,包括头部运动测量单元的设计,采用了三轴陀
螺仪L3G4200D和三轴加速度传感器ADXL345。
张海龙1;周 威2,耿乙迦1,张先彪1,刘春杰1
(1.吉林大学物理学院,吉林 长春 130012;2.吉林大学计算机学院,吉林 长春 130012)
摘 要:介绍了一种用于残疾人的智能交互系统——头部动作识别系统的主体硬件框架,包括头部运动测量单元的设计,采用了
三轴陀螺仪L3G4200D和三轴加速度传感器ADXL345。机械臂的执行器驱动单元设计,该部分采用MOSFET驱动,有电流反
馈。机械臂结构设计,该部分采用线性执行器电动推杆,推力1500N,速度在2mm/s至60mm/s之间可控,行程200mm,机械
臂底盘支持360度全向旋转,整体水平作用距离达1.2m,垂直作用距离1.0m,腕关节支持360度旋转,夹持机构开合行程
30mm,可以应对一般家庭应用。为机械臂控制算法的工作提供了硬件平台。
关键词:人工智能;头部运动识别;硬件设计;人机接口;机械臂
中图分类号:391.4 文献标识码:A 文章编号:1003-7241(2013)06-0060-05
1 引言
现如今,人们平均寿命不断提高,但是身体的衰老依然在继续。丧失了四肢行动能力的人越来越多。如何帮助这些人进行正常
的生活成为一个难题。于是出现了助残的智能机械装置,重庆邮电大学设计了一种通过唇部检测提供人机接口的智能轮椅装置
[1] ,通过视觉检测唇部的运动变化来控制轮椅。马来西亚的人员通过检测EOG信号来控制轮椅的运动[2],即在人的面部安装
电极,即通过测量人面部肌肉运动时的电压变化来控制轮椅。通过机器视觉检测人头部运动提供人机接口,出现了基于双目视
觉的智能轮椅[3],通过机器视觉检测人眼的移动来控制轮椅。常用方法还有语音识别方法,即通过建立语音库,采取端点检
测,特征提取,利用识别语音信息控制轮椅的运动[4]。
本文利用加速度计与陀螺仪组合单元检测人的头部的机械运动,控制机械臂运动并抓取目标,之后人可以控制机械臂将物品放
在适当的位置,可以为四肢瘫痪的人提供一种交互式的辅助装置。根据系统功能,将模块分为头部动作识别单元和机械手部
分。
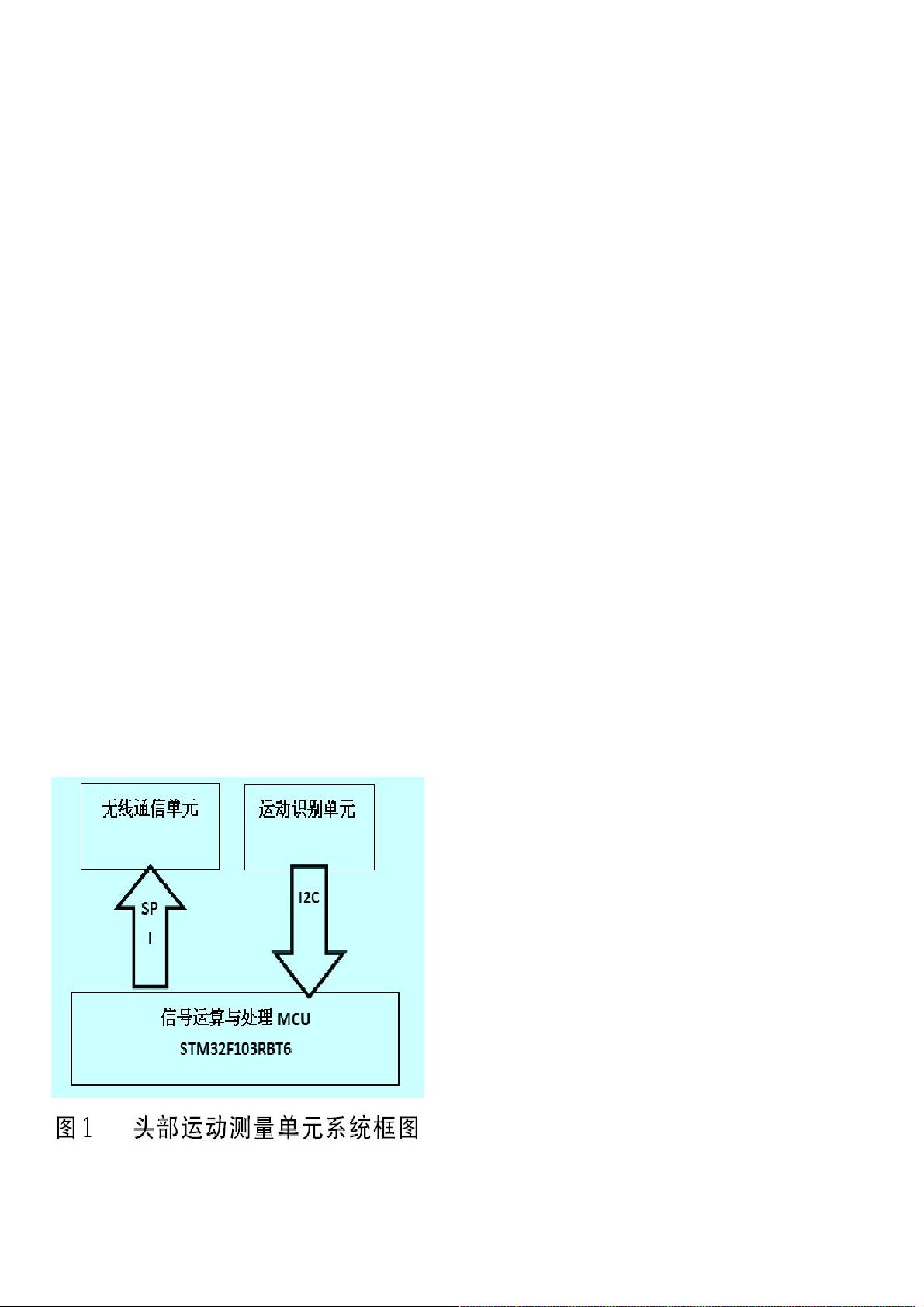
2 头部运动测量单元设计
头部运动识别单元采用三轴数字陀螺仪与三轴加速度传感器融合的策略。将采集到的信息经过数字滤波处理后,估算出头部的
运动姿态,通过无线单元发送到机械臂执行端。系统框图如下:
模块详细设计如下:
2.1 运动检测单元设计
陀螺仪采用意法半导体(ST)推出的L3G4200D。L3G4200D是三轴数字陀螺仪,支持I2C和SPI接口,量程范围从±250dps
下载后可阅读完整内容,剩余6页未读,立即下载

weixin_38679449
- 粉丝: 5
- 资源: 935
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++多态实现机制详解:虚函数与早期绑定
- Java多线程与异常处理详解
- 校园导游系统:无向图实现最短路径探索
- SQL2005彻底删除指南:避免重装失败
- GTD时间管理法:提升效率与组织生活的关键
- Python进制转换全攻略:从10进制到16进制
- 商丘物流业区位优势探究:发展战略与机遇
- C语言实训:简单计算器程序设计
- Oracle SQL命令大全:用户管理、权限操作与查询
- Struts2配置详解与示例
- C#编程规范与最佳实践
- C语言面试常见问题解析
- 超声波测距技术详解:电路与程序设计
- 反激开关电源设计:UC3844与TL431优化稳压
- Cisco路由器配置全攻略
- SQLServer 2005 CTE递归教程:创建员工层级结构
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


