计算机视觉在移动机器人中的视觉跟踪技术综述
82 浏览量
更新于2024-06-16
收藏 911KB PDF 举报
视觉跟踪器在移动机器人中的应用及综述
视觉跟踪器是计算机视觉中最具挑战性的问题之一,它可以为机器人提供对指定目标的跟踪、定位和识别,并将目标或环境的参数提供给控制器供后续使用。在移动机器人领域,视觉跟踪器扮演着至关重要的角色,能够为机器人提供必要的物理和环境参数,以便实现机器人的实际应用。
视觉跟踪器的基本框架包括检测算法、跟踪策略、更新策略、在线分类器、重检测器等分支算法的集成。其中,检测算法负责检测目标的出现,跟踪策略负责跟踪目标的运动状态,更新策略负责更新目标的参数,在线分类器负责对目标进行分类,重检测器负责重检测目标的出现。
在视觉跟踪器中,存在两种主要的方法:产生式方法和判别式方法。产生式方法通过学习目标的运动模式来预测目标的未来状态,而判别式方法通过学习目标的特征来区分目标和背景。
在移动机器人领域,视觉跟踪器的应用非常广泛,包括目标跟踪、环境感知、机器人导航等。视觉跟踪器可以为机器人提供对指定目标的跟踪、定位和识别,并将目标或环境的参数提供给控制器供后续使用。
近年来,视觉跟踪器的研究主要集中在三个方向:相关滤波器、深度学习和卷积特征。相关滤波器可以对目标进行跟踪,并将其与背景进行区分。深度学习可以学习目标的特征,并对目标进行分类。卷积特征可以对目标进行描述,并将其与背景进行区分。
在移动机器人领域,视觉跟踪器的发展趋势主要集中在三个方向:提高跟踪精度、提高实时性和提高鲁棒性。为了提高跟踪精度,可以使用深度学习和卷积特征等方法来学习目标的特征。为了提高实时性,可以使用相关滤波器和卷积特征等方法来提高跟踪速度。为了提高鲁棒性,可以使用多传感器融合和机器学习等方法来提高跟踪器的鲁棒性。
视觉跟踪器在移动机器人领域扮演着至关重要的角色,能够为机器人提供必要的物理和环境参数,以便实现机器人的实际应用。未来,视觉跟踪器的研究将集中在提高跟踪精度、提高实时性和提高鲁棒性等方向。
新帧
下一帧
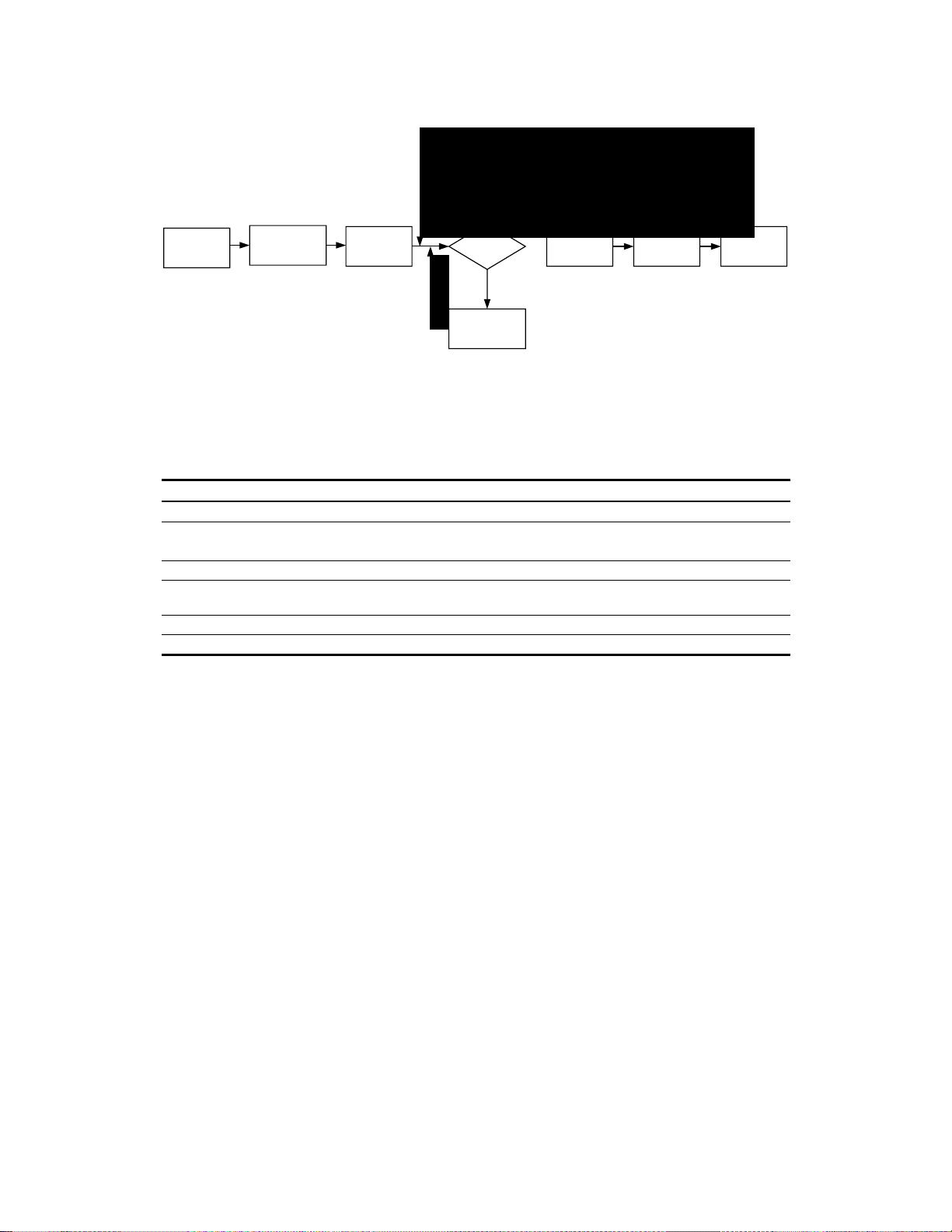
见图4。判别方法框架。判别式方法不关心数据是如何产生的,它只关心信号之间的差异,它
把跟踪问题看作是一个二元分类问题,然后简单地通过差异对给定的信号进行分类。一般来
说,找到目标和背景是决策边界。跟踪被视为逐帧检测问题,目标帧是从第一帧中手动选择
的。
表3.常见的机器学习方法
方法
代表
综合学习
[98]第95话:我的世界,我的世界
在线学习
Co-Training [99],Multi-Instance Learning [82],SVM [100],
[103]第101话:我的世界,我的世界
随机学习
通用报告格式[104]
深度学习
CNN [105],DBN [106],SAE [107],RBN [108],R-CNN
[109]
贝叶斯分类器
Naive Bayes [110],TAN [111],BAN [111],GBN [112]
回归网络
[114]第113话:我的世界
3.
视觉跟踪技术
3.1
相关滤波器
相关滤波器(CF),又称判别相关滤波器(DCF),其原理是两个相关信号f和g的卷积响
应大于不相关信号的卷积响应(1)。其中f
*
是
f
的复共轭,在连续域中使用
Σ
,在离散域中使
用Σ。在视觉跟踪中,滤波器只对每个感兴趣的对象产生高响应,对背景产生低响应。由于循
环矩阵的引入以及快速傅立叶变换(FFT)、离散傅立叶变换(DFT)和逆FFT(IFFT)的应
用,使视频采样的速度得到了较大的提高。比较一个从最小值(
)到最小
值
( )
的
比
较。
(
)
()
中文
(
简体
)
中
文
(
繁体
)
(
)
(一)
由于Bolme等人学习了合成精确滤波器(ASEF)[115]和最小输出平方误差和(MOSSE)
滤波器[116]的平均值,基于相关滤波器的跟踪器(CFTs)在接下来的几年中引起了视觉跟踪
社区[57,117]的极大关注Chen等人
[118]总结了近年来相关滤波视觉跟踪方法的总体框架(图5)。目前的大多数差价合约都是基
于这一框架,只是改进或取代其中的一MOSSE算法仅使用单通道灰度特征,显示速度高达
615FPS,充分体现了相关滤波的优势然后CSK [57]基于MOSSE扩展了填充和循环矩阵。在
Galoogahi 等 人 学 习 具 有 多 通 道 特 征 的 MCCF[119] 之 后 , 改 进 的 多 通 道 特 征 版 本 Kernel
Correlation
前景(目
标)
正
约束
分类器
跟踪器
更新
模型
更新窗
口
负
权重
约束
更新
背景
建立模
型
目标初
始化
剩余29页未读,继续阅读
2021-10-26 上传
2013-01-04 上传
2021-08-18 上传
2023-03-29 上传
2023-05-29 上传
2023-05-29 上传
2023-04-01 上传
2023-05-04 上传
2023-04-01 上传

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
