CAN BUS规范v2.0详解:标准与扩展格式
"CAN BUS规范v2.0+中文版"
CAN BUS规范,即控制器局域网(Controller Area Network)通信规范,是汽车行业及其他自动化领域的通用通信协议,它允许不同设备在共享总线系统上进行高效、可靠的数据交换。CAN BUS规范V2.0主要包含了两种报文格式:标准格式和扩展格式。
标准格式使用11位标识符(ID),适用于简单的通信需求,具有较高的传输效率。而扩展格式则提供了29位的标识符,极大地扩展了地址空间,适合需要更复杂寻址策略的系统。这两种格式可以同时存在于同一网络中,通过第一个保留位来区分,扩展格式会在该位上设置为1,标准格式则设置为0。
CAN BUS V2.0的规范分为A部分和B部分。A部分详细描述了按照CAN1.2规范定义的报文格式,包括数据帧、远程帧、错误帧、过载帧和帧间空间等基本元素。数据帧用于传输实际数据,远程帧用于请求数据,错误帧用于错误检测和报告,过载帧用于延长帧间的间隔时间,帧间空间则是保证通信时序的重要组成部分。报文校验部分涉及CRC校验,确保数据传输的准确性。
B部分则专门介绍了标准格式和扩展格式的差异及使用方法。对于报文编码,CAN BUS采用二进制反码编码,以提高抗干扰能力。在错误处理方面,规范涵盖了错误检测、错误标定、故障界定等机制,确保了网络的稳定性。位定时要求是保证通信同步的关键,CAN BUS允许一定的振荡器容差,以适应不同硬件条件下的通信需求。
CAN BUS规范V2.0的引入,使得系统设计者可以根据实际需求选择合适的报文格式,既可以选择简洁高效的标准格式,也可以选择具有更大灵活性的扩展格式。同时,新规范保持与CAN1.2及旧版本的兼容性,使得已经存在的设备可以无缝接入新的网络环境。这使得CAN BUS成为一种高度灵活且广泛应用的通信协议,不仅在汽车行业,还在工业自动化、医疗设备、航空航天等领域发挥了重要作用。
- 7 -
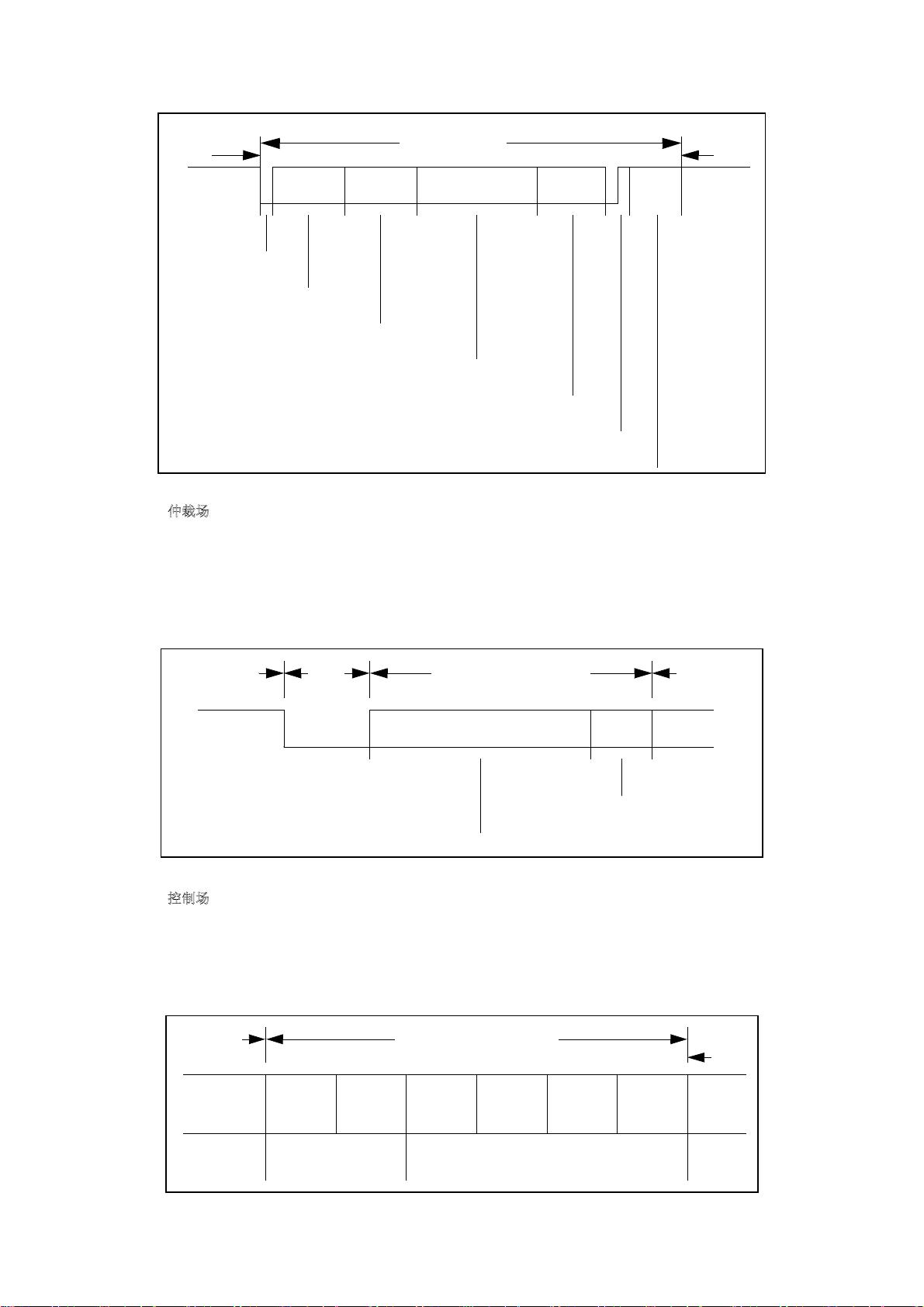
Interframe
Space
Interframe
Space
Start of Frame
Arbitrat ion Field
Cont rol Field
Data Field
CRC F ield
ACK F ield
End of Frame
or
Overload
Frame
DATA FRAME
仲
裁场
仲裁场包括识别符和远程发送请求位(RTR )。
识别符:识别符的长度为 11 位。这些位的发送顺序是从 ID-10 到 ID-0。最低位是 ID-0。最高的 7 位
(ID-10 到 ID-4)必须不能全是“隐性”。
RTR 位:该位在数据帧里必须为“显性”,而在远程帧里必须为“隐性”。
Interframe
Space
St art
of Frame
Identifier
RT R B it
Cont rol
Fie ld
ARBI TRATION FIELD
控
制场
控制场由 6 个位组成,包括数据长度代码和两个将来作为扩展用的保留位。所发送的保留位必须为“显
性”。接收器接收所有由“显性”和“隐性”组合在一起的位。
数据长度代码:数据长度代码指示了数据场中字节数量。数据长度代码为 4 个位,在控制场里被发送。
r1 r0 DLC3 DLC2 DLC1 DLC 0
or
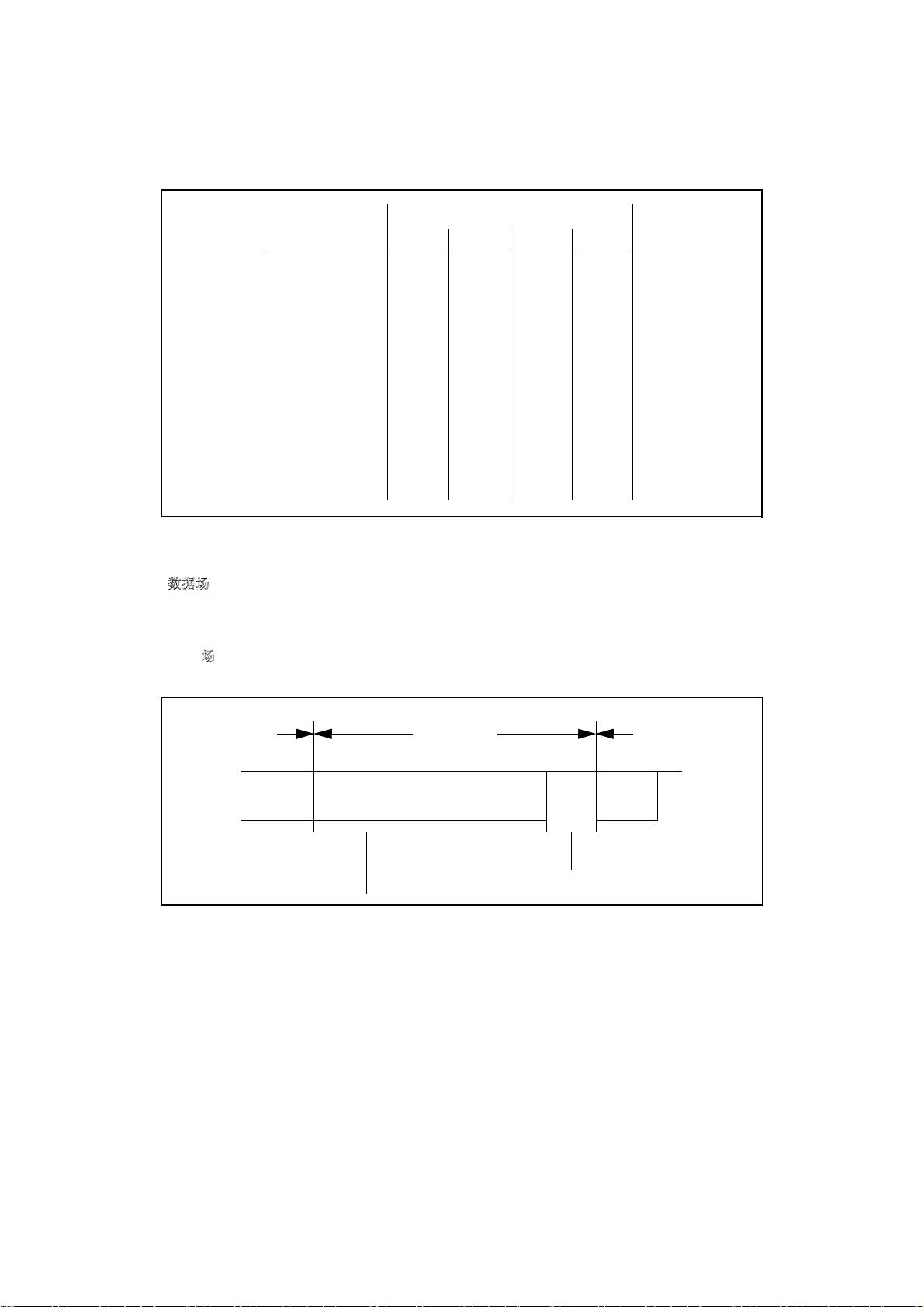
CRC
Field
Arbitration
Fi eld
Data
Fi eld
CO NTRO L FIELD
Data Lengt h Codereserved
bits
剩余35页未读,继续阅读
2020-12-07 上传
2023-07-26 上传
2024-10-30 上传
2024-10-30 上传
2023-08-09 上传
2024-10-30 上传
2023-07-16 上传

lantis_ldf
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- ORACLE常用命令
- The C++ Standard Library STL 标准库 C++
- Effective_C++2e(中文版).pdf
- 2950交换机配置手册
- 教你如何使用mysql存储过程
- arcengine学习笔记
- STRUTS2学习文档
- 很不错的网络工程师学习笔记
- Expert C programing
- EJB3.0学习资料
- 英文原版书籍 ruby-phrasebook-developers-library
- TP800技术手册.pdf
- 8086指令(英文)
- 英文原版书籍 sharepoint-designer-tutorial-working-with-sharepoint-websites.pdf
- SEO精品教程 ppt格式的
- 二级公共基础知识汇总
