STC单片机控制的爬楼轮椅前腿机构设计与实现
版权申诉
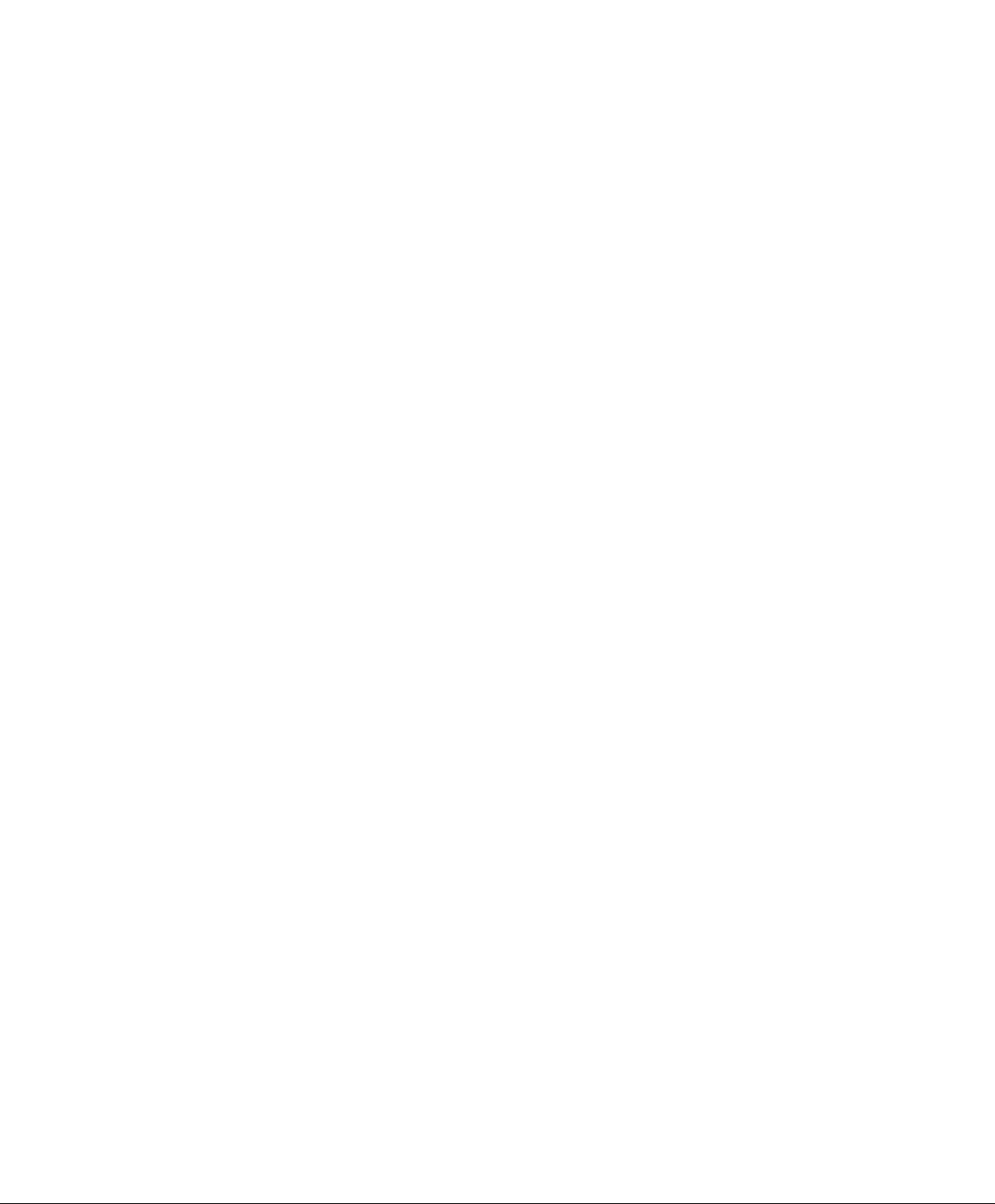
“基于单片机的爬楼轮椅前腿机构控制系统研究”是一篇探讨如何利用单片机技术设计并实现爬楼轮椅前腿机构控制系统的论文。该轮椅旨在解决老年人和残疾人的出行问题,特别是在应对复杂地形如楼梯时。论文主要涵盖了控制系统的设计、硬件制作和软件编程等方面。
在系统设计之初,论文首先阐述了前腿机构在爬楼轮椅不同工作模式下的功能,包括前腿升降机构、底盘环境感知机构和前腿位姿调节机构。这些机构协同工作,确保轮椅在爬楼过程中的稳定性和安全性。通过功能分析,设计了整个控制系统的架构,考虑了轮椅的动作需求和预期功能。
在硬件设计环节,以STC单片机为核心,构建了控制板,并设计了多机通信电路、传感器应用电路和电机驱动电路。这些硬件组件是控制系统的基础,负责接收、处理和执行各种指令。
在软件层面,论文构建了控制系统的整体框架,编写了主程序和各个子程序,实现了手动模式、上位机模式和自动模式的切换。手动和上位机模式用于调试阶段,而自动模式是最终运行模式,包含了关键的运动控制程序和模糊PID控制算法,以精确控制执行机构的动作。
在实验阶段,论文对程序进行了测试,重点关注上下位机通信、传感器数据检测和执行机构的控制。测试过程中,解决了多机通信中出现的数据完整性问题和通信中断,同时也分析了传感器测量误差的原因。经过多次测试,证明了控制系统能实时响应指令,有效地将执行机构移动到目标位置,满足爬楼轮椅的爬楼动作需求。
关键词涉及轮腿式爬楼轮椅、单片机技术、前腿机构、多机通信和模糊PID控制,这些都是论文的核心研究领域和技术手段。
这篇论文深入研究了基于单片机的爬楼轮椅前腿控制系统,不仅探讨了理论设计,还通过实践验证了系统的可行性和有效性,对于推动智能轮椅技术的发展具有重要意义。
基于单片机的爬楼轮椅前腿机构控制系统研究
- 6 -
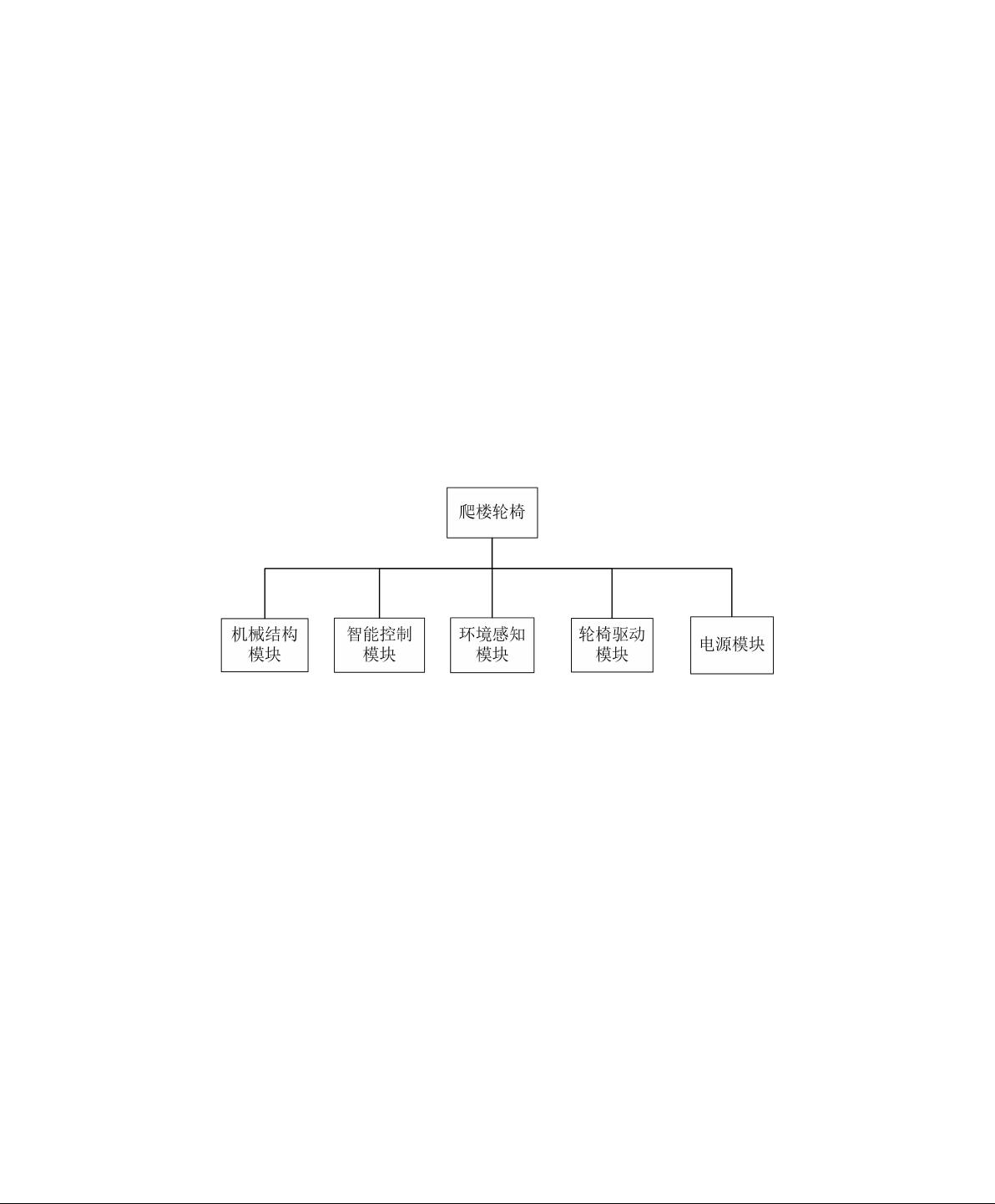
轮椅的控制可以分为三大部分:前腿及底盘部分、座椅及脚踏板部分、主驱动轮及后
腿部分,本文主要负责前腿及底盘机构的控制策略研究。
虽然课题组对爬楼轮椅的前腿机构已经有所研究,但是随着研究的不断深入又发
现了原来的不足之处。在机械机构方面,原来的前腿位姿调节机构为欠驱动机构,并
且在滑块的伸缩调节和杆件的摆动调节之间存在较强的耦合关系。在控制方面,前期
只研究了前腿机构的独立控制,并没有将前腿升降和位姿控制与底盘环境感知系统结
合起来。为了更好地实现爬楼轮椅的预期功能,本课题对爬楼轮椅前腿机构的机械结
构进行了改进优化,本文则对改进后的前腿机构进行控制系统的研究。
首先,为了确定前腿机构控制系统的总体方案,将对控制系统中各执行机构的机
械结构和传动关系进行分析;其次,根据制定的控制系统总体方案,将对控制系统的
硬件和软件部分设计,硬件方面主要将对以
STC
单片机为核心的控制板、多机通信电
路、传感器应用电路、电机驱动电路等进行设计,软件方面将对控制系统的整体框架
进行搭建,并对其中的主函数及各个子函数进行设计;最后,将在爬楼轮椅实验平台
上对控制系统进行测试,并分析实验结果,其中重点将对上下位机多机通信、传感器
数据测量以及执行机构控制系统进行测试。
1.3.2 论文的章节安排
本文分为六个章节,下面对各章工作进行详细介绍:
第一章:绪论。阐述本课题的研究背景与意义,分析爬楼轮椅控制系统的发展现
状,确定本文研究的主要内容和工作安排。
第二章:前腿机构控制系统的总体方案。首先将介绍爬楼轮椅的组成及功能;然
后对前腿机构控制系统的各执行机构进行分析;最后确定以
STC
单片机为核心的前腿
机构控制系统总体方案。
第三章:前腿机构控制系统硬件设计。首先将对主控芯片 STC12LE5A60S2 进行
简要介绍,并对其引脚进行分配;然后对控制系统中各个模块的应用电路进行设计;
最后则对步进电机及继电器的驱动电路进行设计。
第四章:前腿机构控制系统软件设计。首先将对软件开发工具进行介绍;其次制
定多机通信协议并进行接收数据和发送数据的程序设计;然后对所用传感器进行程序
设计并校正;最后为各执行机构设计控制程序。
第五章:实验结果与分析。首先将对爬楼轮椅实验平台进行介绍;其次对多机通
信的硬件和软件进行测试,包括通信可靠性和通信速率的测试;接着对所用传感器的
测量误差进行分析并提出改进方法;最后对各执行机构的控制程序进行测试并对每个
模块的测试结果进行分析。
第六章:总结与展望。对所做的研究进行总结,并对控制系统中存在的不足提出
改进措施,对未来的研究方向进行展望。
剩余79页未读,继续阅读
272 浏览量
898 浏览量
243 浏览量
229 浏览量
232 浏览量
166 浏览量
1029 浏览量
2025-01-01 上传
2025-01-01 上传
2025-01-01 上传

「已注销」
- 粉丝: 846
- 资源: 3601
 我的内容管理
展开
我的内容管理
展开







最新资源
- 巧用google搜索技术,高效高速搜索
- bash shell英文原版教程
- sg3525涓枃璧勬枡(1).pdf
- 面向对象程序设计vc2
- AdobeInDesginPlugInDevelop
- 大学生求职指南精华版
- Klette R., Rosenfeld A. Digital Geometry.. Geometric Methods for Digital Image Analysis (Morgan Kaufmann, 2004)
- LM311.pdf技术资料
- Beginning Linux Programming (4nd edn)
- 如何获取中文的拼音字母
- IBM DB2通用数据库Windows版快速入门.pdf
- dos通用命令dos通用命令
- ArcObject入门教程
- 基于FPGA的神经网络自整定PID控制器设计
- 约束Delaunay三角剖分动态算法研究
- java基础习题集,非常不错的东东
