KUKA机器人_Interbus_输入输出端口配置指南
机器人控制系统中的输入输出端口配置
机器人控制系统中的输入输出端口配置是指在机器人控制系统中,如何配置和管理输入输出端口,以实现机器人的控制和操作。配置输入输出端口是机器人控制系统的关键步骤,因为它直接影响机器人的性能和稳定性。
在机器人控制系统中,输入输出端口是机器人与外部设备之间的接口,用于传输数据和控制信号。配置输入输出端口需要考虑机器人的应用场景、外部设备的类型和数量、数据传输的速度和格式等因素。
在KUKA机器人控制系统中,输入输出端口配置是通过IOSYS.INI文件来实现的。IOSYS.INI文件是一个文本文件,包含了机器人控制系统的配置信息,包括输入输出端口的配置、驱动程序的加载、外部设备的连接等。
在IOSYS.INI文件中,有多个部分,包括CONFIG、DRIVERS、MFC、INTERBUS等。其中,CONFIG部分定义了机器人控制系统的版本号和配置信息;DRIVERS部分定义了驱动程序的加载和配置信息;MFC部分定义了MFC设备的配置信息;INTERBUS部分定义了Interbus设备的配置信息。
在INTERBUS部分,需要配置Interbus驱动程序的加载和激活。Interbus是一个工业级的字段总线,用于连接机器人控制系统与外部设备。Interbus驱动程序的加载和激活是通过在IOSYS.INI文件中添加相应的配置信息来实现的。
此外,在机器人控制系统中,输入输出端口的配置还需要考虑安全性和可靠性。例如,在配置输入输出端口时,需要确保机器人控制系统的安全性和稳定性不受影响;同时,需要确保输入输出端口的配置信息不会被未经授权的访问或修改。
机器人控制系统中的输入输出端口配置是机器人控制系统的关键组件,需要考虑多个因素,包括机器人的应用场景、外部设备的类型和数量、数据传输的速度和格式等。通过正确的配置输入输出端口,机器人控制系统可以实现高效、可靠和安全的运行。
I 03.09.2003 I College I PRhI 6
KUKA Roboter GmbH, Hery-Park 3000, D-86368 Gersthofen, Tel.: +49 (0) 8 21/45 33-1906, Fax: +49 (0) 8 21/45 33-2340, http://www.kuka-roboter.de
© Copyright by KUKA Roboter GmbH College
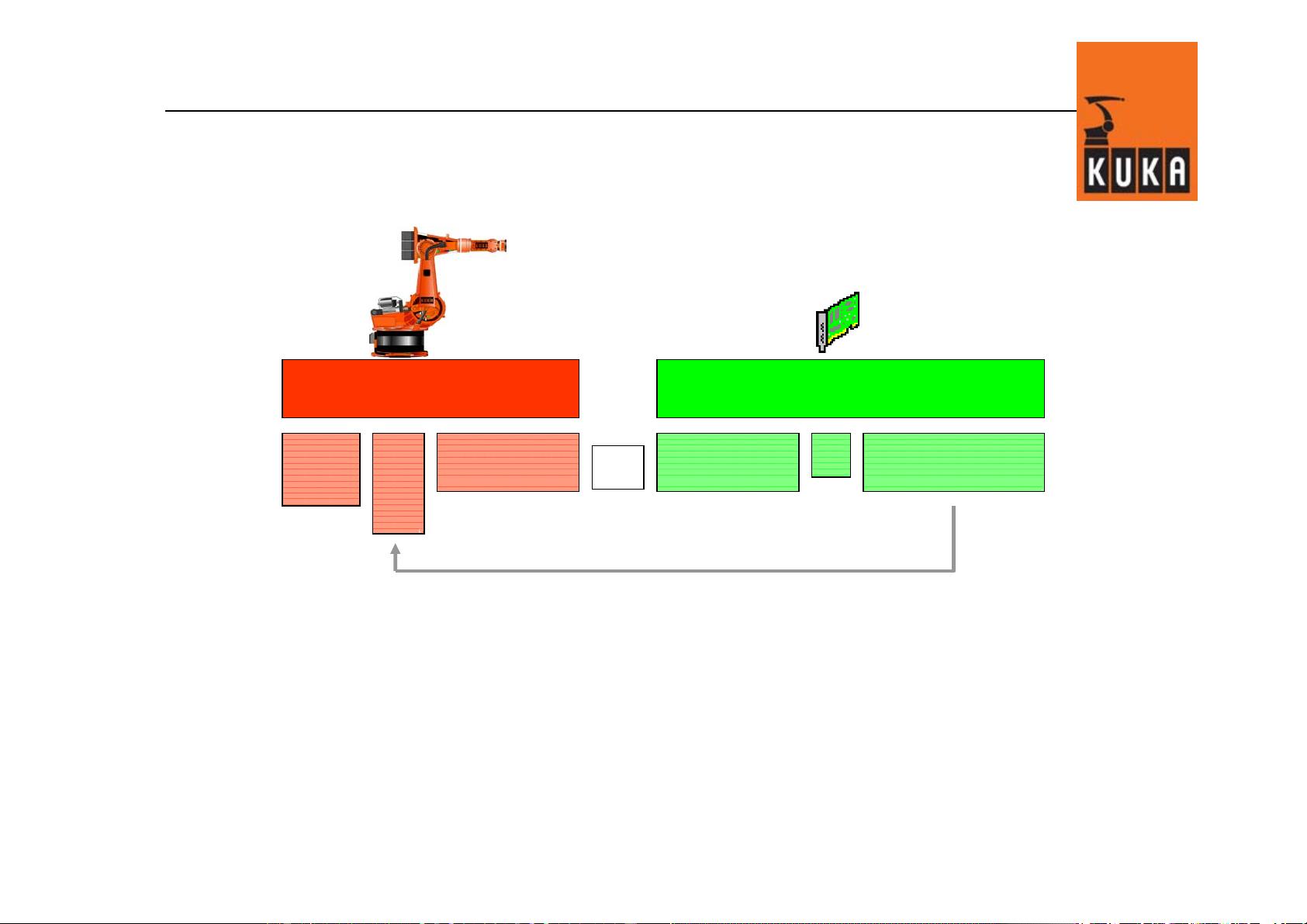
I/O assignment, digital I/Os (1)
Example: INB2=2,x2
OUTW6=32,x1
Byte offset
,
xMultiplier
=
Interbus side
IN
OUT
B
W
DW
Byte offset
Robot side
剩余26页未读,继续阅读
2018-11-01 上传
2023-07-29 上传
2023-05-16 上传
2023-06-10 上传
2023-06-10 上传
2023-08-17 上传
2023-07-08 上传

lh6662459
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- WPF渲染层字符绘制原理探究及源代码解析
- 海康精简版监控软件:iVMS4200Lite版发布
- 自动化脚本在lspci-TV的应用介绍
- Chrome 81版本稳定版及匹配的chromedriver下载
- 深入解析Python推荐引擎与自然语言处理
- MATLAB数学建模算法程序包及案例数据
- Springboot人力资源管理系统:设计与功能
- STM32F4系列微控制器开发全面参考指南
- Python实现人脸识别的机器学习流程
- 基于STM32F103C8T6的HLW8032电量采集与解析方案
- Node.js高效MySQL驱动程序:mysqljs/mysql特性和配置
- 基于Python和大数据技术的电影推荐系统设计与实现
- 为ripro主题添加Live2D看板娘的后端资源教程
- 2022版PowerToys Everything插件升级,稳定运行无报错
- Map简易斗地主游戏实现方法介绍
- SJTU ICS Lab6 实验报告解析
