
2005 Microchip Technology Inc. DS21667D_CN 第 5 页
MCP2551
1.5 TXD 稳定显性检测
如果 MCP2551 检测到在 TXD 输入端的持续低电平 ,它
将禁止 CANH 和 CANL 的输出驱动器功能,以避免 CAN
总线上数据混乱。如果 TXD 保持低电平超过 1.25 ms
(最小值),就禁止驱动功能。这就意味着每比特的时间
最大是 62.5 µs (总线速率为 16 kb/s), 允许在多个比
特错误和一系列帧错误的情况下传输高达 20 个的连续
显性比特位。只要 TXD 保持为低电平状态,驱动器就保
持禁止。TXD 的上升沿将复位定时器逻辑并使能 CANH
和 CANL 输出驱动器。
1.6 上电复位
当器件上电时, CANH 和 CANL 保持高阻态直到 VDD
到达电压 VPORH。并且,如果当 VDD 到达 VPORH 时
TXD 是低电平,CANH 和 CANL 仍将保持高阻态。只有
在 TXD 被置为高电平时, CANH 和 CANL 才被激活。
一旦上电,如果 V
DD 电压低于 VPORL,CANH 和 CANL
将进入高阻态,提供正常操作中的欠压保护。
1.7 引脚描述
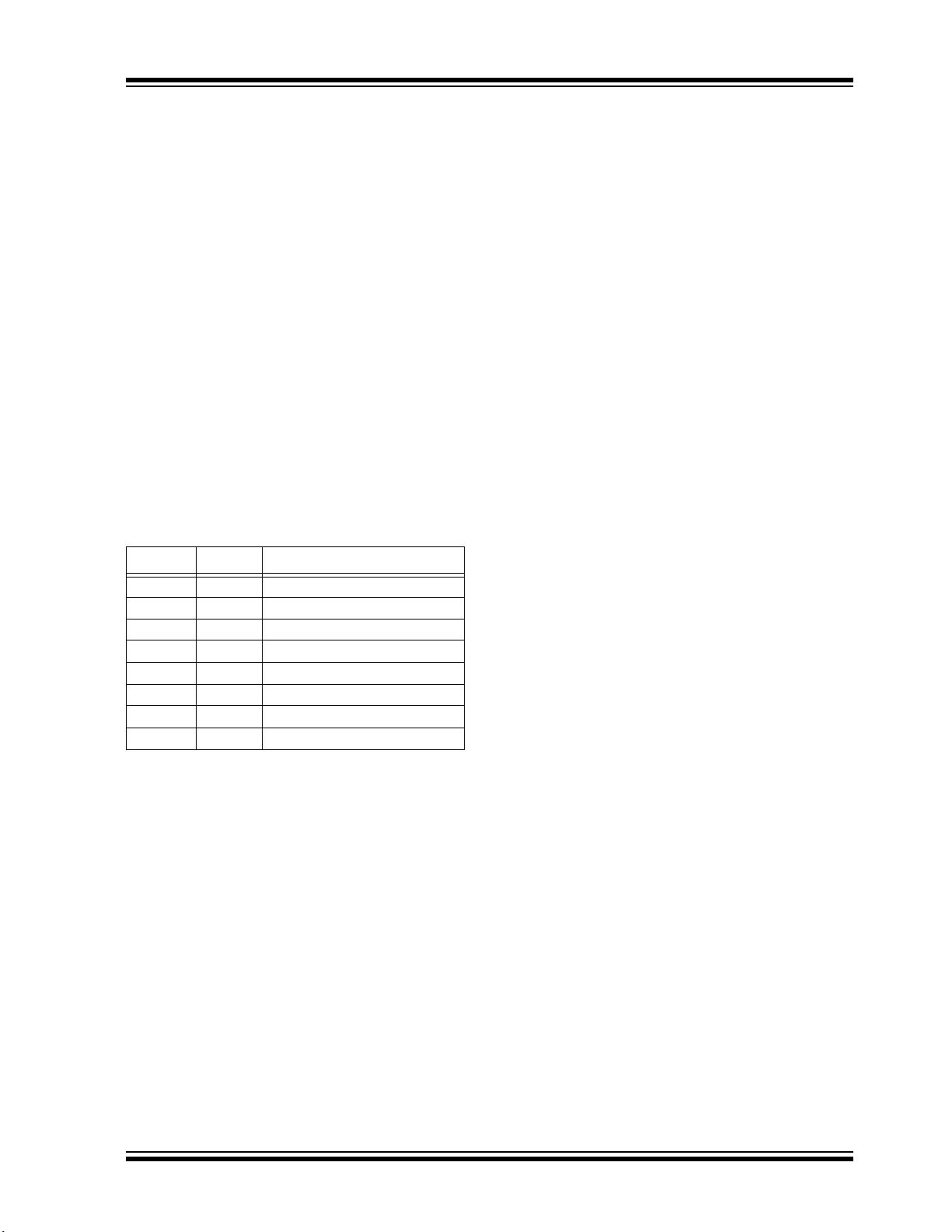
表 1-3 为 8 个引脚信息。
表 1-3: MCP2551 引脚
1.7.1 发送器数据输入 (TXD)
TXD 是一个 TTL 兼容输入引脚。该引脚上的数据通过
CANH 和 CANL 差分输出引脚输出。它通常与 CAN 控
制器的发送器数据输出相连。当 TXD 为低电平时,
CANH 和 CANL 为显性状态。当 TXD 为高电平时,
CANH 和 CANL 为隐性状态,此时假设另外的 CAN 节
点没有以显性状态驱动 CAN 总线。 TXD 拥有一个内部
的上拉电阻 (通常为 25 kΩ,连接到 V
DD)。
1.7.2 接地端 (VSS)
接地引脚。
1.7.3 电源端 (VDD)
正电源引脚。
1.7.4 接收器数据输出 (RXD)
RXD 是一个 CMOS 兼容输出引脚,它根据 CANH 和
CANL 引脚上的差分信号决定驱动高电平还是低电平。
它通常与 CAN 控制器的接收器数据输入相连。当 CAN
总线为隐性时 RXD 处于高电平,当 CAN 总线为显性的
时候它为低电平。
1.7.5 参考电压 (VREF)
参考电压输出 (定义为 VDD/2)。
1.7.6 CAN 低电压端 (CANL)
CANL 输出驱动 CAN 差分总线的低端。该引脚同时与接
收器输入比较器内部相连。
1.7.7 CAN 高电压端 (CANH)
CANH 输出驱动 CAN 差分总线的高端。该引脚同时与
接收器输入比较器内部相连。
1.7.8 斜率电阻输入 (RS)
RS 引脚通过外部偏置电阻选择高速、斜率控制或待机
模式。
引脚编号 引脚名称 引脚功能
1TXD发送器数据输入
2V
SS 接地
3VDD 提供电压
4RXD接收器数据输出
5V
REF 参考输出电压
6 CANL CAN 低电压 I/O
7 CANH CAN 高电压 I/O
8R
S 斜率控制输入
剩余21页未读,继续阅读

ZFF_QYM
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- zlib-1.2.12压缩包解析与技术要点
- 微信小程序滑动选项卡源码模版发布
- Unity虚拟人物唇同步插件Oculus Lipsync介绍
- Nginx 1.18.0版本WinSW自动安装与管理指南
- Java Swing和JDBC实现的ATM系统源码解析
- 掌握Spark Streaming与Maven集成的分布式大数据处理
- 深入学习推荐系统:教程、案例与项目实践
- Web开发者必备的取色工具软件介绍
- C语言实现李春葆数据结构实验程序
- 超市管理系统开发:asp+SQL Server 2005实战
- Redis伪集群搭建教程与实践
- 掌握网络活动细节:Wireshark v3.6.3网络嗅探工具详解
- 全面掌握美赛:建模、分析与编程实现教程
- Java图书馆系统完整项目源码及SQL文件解析
- PCtoLCD2002软件:高效图片和字符取模转换
- Java开发的体育赛事在线购票系统源码分析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


