ADAMS与MATLAB结合控制工业机器人运动仿真研究
版权申诉
184 浏览量
更新于2024-06-23
收藏 4.9MB DOC 举报
"本文探讨了在ADAMS环境下对工业机器人进行运动控制的方法,结合MATLAB和Visual C++ 6.0实现视景仿真。"
在现代机械设计领域,虚拟样机技术已经成为不可或缺的一部分,它允许设计师在物理样机制造之前通过计算机模拟来分析和优化设计方案。ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是这一领域的领导者,它提供了全面的静力学、运动学和动力学分析工具,适用于各种机械系统的建模和仿真。
ADAMS软件对于复杂的机器人机械系统同样适用,但在控制其精确运动时,单纯依赖ADAMS可能力有未逮。这时,MATLAB的介入显得尤为重要,作为强大的数学应用软件,MATLAB具备强大的计算能力,可以构建复杂的控制模型,以适应复杂机器人系统的运动控制需求。OpenGL作为一种底层三维图形应用程序接口(API),在图形开发领域被广泛接受,能生成高质量的3D图形,与Visual C++ 6.0结合,可以构建高效的可视化仿真系统。
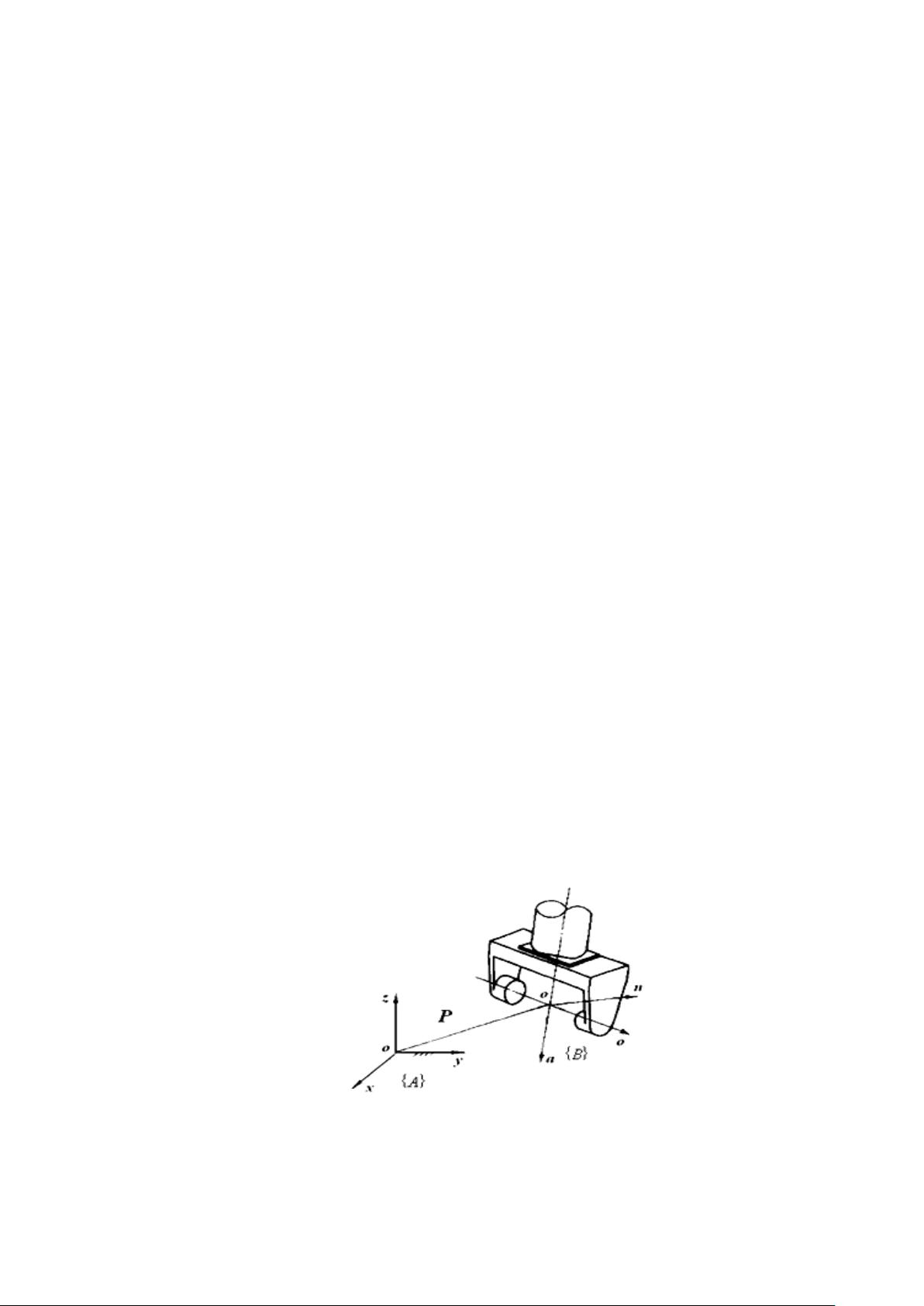
在本文中,作者首先介绍了刚体在空间中的表示,包括坐标系的建立和矩阵变换。接着,利用DH参数法,将机器人的关节角度参数化,推导出正向运动学方程和逆向运动学解,以确定机器人末端执行器的位置。在ADAMS中,详细展示了机器人模型的三维建模步骤,包括整体框架设计、单个组件绘制和布尔运算等。同时,对关节参数进行了设计,以实现更灵活的运动控制。
接下来,论文深入研究了轨迹规划问题,比较了关节空间和直角坐标空间规划的差异,并采用了三次多项式和五次多项式函数对机器人运动轨迹进行规划。通过ADAMS内置的Step函数进行轨迹仿真分析,以评估规划的有效性。
最后,作者在Windows XP Professional操作系统下,利用Visual C++ 6.0作为开发平台,结合OpenGL进行视景仿真,构建了三自由度机械手的可视化模拟环境。这样的联合应用,不仅增强了仿真效果,还便于理解机器人在实际工作环境中的运动行为。
这篇文档揭示了如何综合运用ADAMS、MATLAB和Visual C++ 6.0等工具,进行工业机器人运动控制的建模、分析和视景仿真,为机器人控制系统的设计与优化提供了一种有效的方法。通过这种方式,设计者可以更准确地预测和控制机器人的动态行为,从而提高整体系统性能。

0
. . . 0
. . . 0
. . . 0
1
1
0 0 0 1
x n x o x
x
n
y
y n y o y
o
z
z n z z o
i i i i i i
p
p
p
i i i i i i
p
p
p
i i i i i i
a
a
a
é ù
é ù
é ù
ê ú
ê ú
ê ú
ê ú
ê ú
ê ú
=
ê ú
ê ú
ê ú
ê ú
ê ú
ê ú
ê ú
ê ú
ê ú
ë û
ë û
ë û
(2-13)
0
. . . 0
. . . 0
. . . 0
0 0 0 1
x n x o x
A
y n y o y
B
z n z z o
i i i i i i
i i i i i i
R
i i i i i i
a
a
é ù
ê ú
ê ú
=
ê ú
ê ú
ê ú
ë û
(2-14)
当坐标系{B}只相对于坐标系{A}单个轴转动时称为基本变换矩阵。如坐标系
{B}只绕坐标系{A}的 x 轴转动角度θ时,基本转动变换矩阵记为 Rot(x,θ),由
式(2-14)可以计算得:
1 0 0
( , ) 0
0
Rot x C S
S C
q q q
q q
é ù
ê ú
= -
ê ú
ê ú
ë û
(2-15)
可以用同样的方法来分析坐标系{B}绕坐标系{A}的 y 轴和 z 轴旋转的情况,
结果如下:
0
( , ) 0 1 0
0
C S
Rot y
S C
q q
q
q q
é ù
ê ú
=
ê ú
ê ú
-
ë û
(2-16)
0
( , ) 0
0 0 1
C S
Rot z S C
q q
q q q
é ù
-
ê ú
=
ê ú
ê ú
ë û
(2-17)
(3) 复合齐次变换
复合齐次变换是有由固定坐标系或当前运动坐标系的一系列沿轴平移和绕轴旋
转变换所组成的,此时该固定坐标系在参考系中不仅原点位置发生变化,同时它的三
个坐标轴单位向量的方向也发生变化。此时的变换顺序很重要,变换顺序不同,结果
不同。
我们假设坐标系(n, o, a)相对于参考坐标系(x ,y ,z)依次进行了下列四个变换:


剩余80页未读,继续阅读
2023-07-11 上传
2021-10-07 上传
2023-07-12 上传
2024-10-31 上传
2024-10-30 上传
2024-10-30 上传
2024-10-30 上传
2024-10-30 上传
2024-11-11 上传

老帽爬新坡
- 粉丝: 98
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于JSF_Spring_Hibernate架构的研究与应用 “硕 士 学 位 论 文”
- jess-tutorial
- abap开发入门,很好的总结
- abap开发入门,很好的总结
- 网页游戏开发入门教程II(webgame游戏模式)
- abap开发入门,很好的总结
- 网页游戏开发入门教程(webgame design)
- 软件架构设计的方法论—分而治之与隔离关注面.pdf
- 数据库课程设计-网上购物系统
- oracle权限设置
- python 教程 详细教程
- Lucene_in_ Action
- Linux+使用技巧33条
- infoX-ISMP SP操作指南(V300R001.3D260).pdf
- eclipse 教程
- Linux系统的shell简介
