双目相机测距原理与立体视觉模型解析
需积分: 0 94 浏览量
更新于2024-08-05
1
收藏 356KB PDF 举报
本文主要介绍了双目成像和双目相机标定的基本原理,涉及到的主要知识点包括双目测距原理、立体视觉模型以及立体校正。
一、双目测距原理
双目测距是利用两个相机模拟人类双眼观察物体时产生的视差来计算物体的深度信息。这一原理基于单目相机的针孔成像模型,单目相机无法获取深度信息,而双目相机通过比较左右相机图像中同一物体的像素位置差异(视差)来估算深度。公式为:𝑍=𝑓‖𝑡‖𝑥𝑙−𝑥𝑟,其中𝑍代表深度,𝑓为焦距,𝑡为基线(两相机中心连线),𝑥𝑙和𝑥𝑟分别为物体在左右相机的像素坐标。实际应用中,由于焦距未知,常使用标定得到的系数𝛼替代,视差𝑑=𝑢𝑙−𝑢𝑟,从而得到深度的表达式:𝑍=𝛼‖𝑡‖𝑑。
二、立体视觉模型
在实际环境中,相机很难达到理想状态,即光轴平行、成像平面共面等。因此,需要进行立体校正,通过标定获取相机的畸变参数和相机间的相对位姿变换。旋转矩阵𝑅和平移向量𝑡描述了右相机相对于左相机的位置,而基础矩阵𝐹和本征矩阵𝑬则用于描述两相机之间的几何关系,它们可以用来解决 epipolar geometry(共轭极线几何)问题,帮助匹配左右图像中的对应点。
三、立体校正
立体校正的目的是消除相机的畸变,使得左右图像的对应点尽可能对齐,便于计算视差。这个过程通常包括相机内部参数的标定(如焦距、主点坐标等)和外部参数的估计(相机间的相对姿态)。校正后,可以使用结构光或特征匹配技术找到对应点,并通过基础矩阵或本征矩阵约束来进一步优化匹配结果。
总结:
双目成像技术在机器人导航、3D重建等领域有广泛应用,但算法复杂度高,计算量大。理解双目测距原理、立体视觉模型和立体校正对于实现精确的3D感知至关重要。通过合理的相机配置、精确的标定和高效的匹配算法,可以提高双目系统的性能,减少误差,实现更准确的深度信息获取。同时,需要注意基线的选择对测距精度和盲区的影响,以及在实际应用中如何克服环境因素带来的挑战。
双目成像及双目相机标定原理整理
一、 双目测距原理
单目相机一般采用针孔成像模型(详见《相机成像模型及相机标定原理整理》),其不足之处
在于无法得知像素所对应实际场景中物体的深度。相应地,基于单目相机的 SLAM 方案也无
法确定场景尺度。测量像素深度的方式有很多,其中双目相机模仿人眼的视差原理,通过计
算同一物体在左右相机中投影的视差来计算深度。其优势在于硬件成本相对较低,但是也有
着算法复杂度较高、计算量大的缺点。
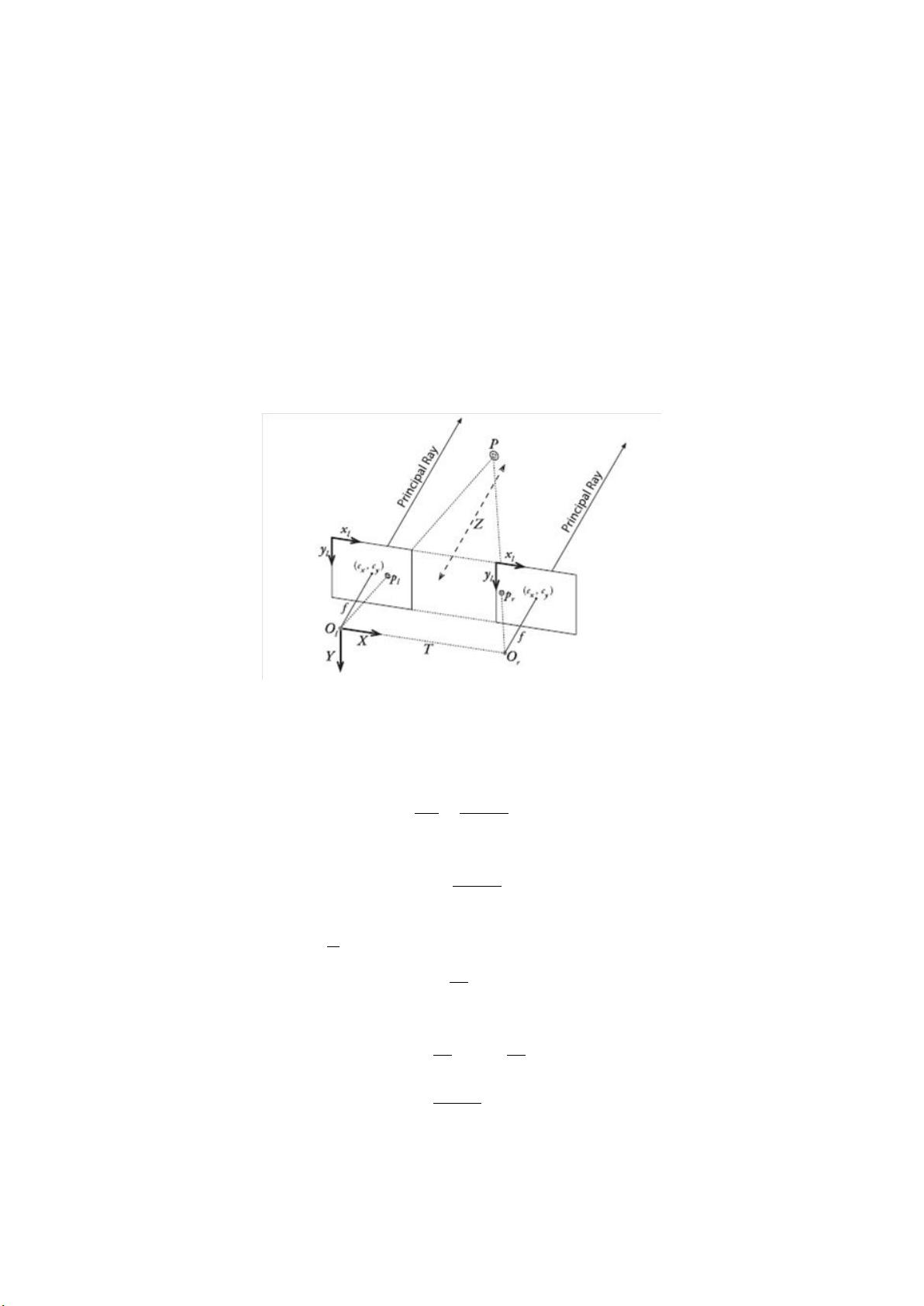
理想状态下,如图 1 所示,两摄像机的光轴平行,成像平面共面,焦距相等,所在对应行的
像素精确对准。
图 1 理想状态下双目测距
两光心的连线为基线,即为左相机到右相机的位移。以左侧相机光心为原点,确立相机坐
标系,有空间中一点
,其中即为其深度。该点在左右相机的投影及其成像平面坐
标分别为
、
。可通过相似三角形原理求点的深度
即
在实际测量中,得到的是点的像素坐标
、
;从标定好的相机内参中也无法
直接得到焦距,而是
。由
可得
即
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
119 浏览量
2020-11-13 上传
点击了解资源详情

俞林鑫
- 粉丝: 20
- 资源: 288
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
